探索 Linux Namespace:Docker 隔离的神奇背后

在
深入理解 Docker 核心原理:Namespace、Cgroups 和 Rootfs
一文中我们分析了 Docker 是由三大核心技术实现的。
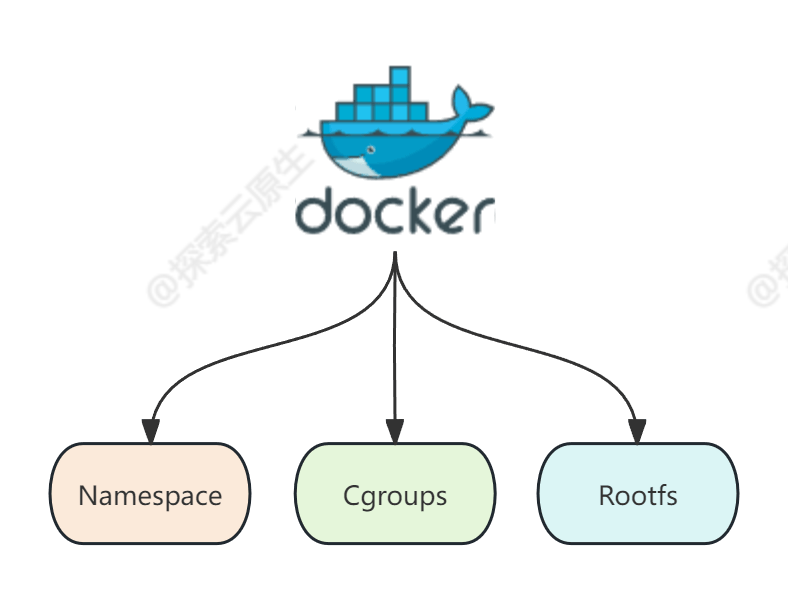
今天就一起分析 Docker 三大核心技术之一的 Linux Namespace。
后续文章会演示如何从零实现一个简易的 Docker,这里先简单了解下 Docker 的核心原理。
如果你对云原生技术充满好奇,想要深入了解更多相关的文章和资讯,欢迎关注微信公众号。
搜索公众号【
探索云原生
】即可订阅

当我们通过
docker run -it
启动并进入一个容器之后,会发现不论是进程、网络还是文件系统,好像都被隔离了,就像这样:
[root@docker cpu]# docker run -it busybox
/ #
/ # ps
PID USER TIME COMMAND
1 root 0:00 sh
7 root 0:00 ps
/ # ip a
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
120: eth0@if121: <BROADCAST,MULTICAST,UP,LOWER_UP,M-DOWN> mtu 1500 qdisc noqueue
link/ether 02:42:ac:11:00:02 brd ff:ff:ff:ff:ff:ff
inet 172.17.0.2/16 brd 172.17.255.255 scope global eth0
valid_lft forever preferred_lft forever
/ # ls
bin dev etc home lib lib64 proc root sys tmp usr var
- ps 命令看不到宿主机上的进程
- ip 命令也只能看到容器内部的网卡
- ls 命令看到的文件好像也和宿主机不一样
这就是
Docker 核心之一,借助 Linux Namespace 技术实现了视图隔离。
看起来容器和宿主机隔离开了
接下来就让我们一起探索一下 Linux Namespace 以及 Docker 是如何借助该能力来实现隔离的。
1. 什么是 Linux 命名空间(Namespace)?
Namespace 是 Linux 提供的一种内核级别环境隔离的方法。
可以使得处于不同 namespace 的进程拥有独立的全局系统资源,改变一个 namespace 中的系统资源只会影响当前 namespace 里的进程,对其他 namespace 中的进程没有影响。
简单来说:namespace 就是对资源的逻辑隔离
目前,Linux 内核里面实现了 8 种不同类型的 namespace:
| 分类 | 系统调用参数 | 隔离内容 | 相关内核版本 |
|---|---|---|---|
| Mount namespaces | CLONE_NEWNS | Mount points | Linux 2.4.19 |
| UTS namespaces | CLONE_NEWUTS | Hostname and NIS domain name | Linux 2.6.19 |
| IPC namespaces | CLONE_NEWIPC | System V IPC, POSIX message queues | Linux 2.6.19 |
| PID namespaces | CLONE_NEWPID | Process IDs | Linux 2.6.24 |
| Network namespaces | CLONE_NEWNET | Network devices, stacks, ports, etc. | 始于Linux 2.6.24 完成于 Linux 2.6.29 |
| User namespaces | CLONE_NEWUSER | User and group IDs | 始于 Linux 2.6.23 完成于 Linux 3.8) |
| Cgroup namespace | CLONE_NEWCGROUP | Cgroup root directory | Linux 4.6 |
| Time namespace | CLONE_NEWTIME | Boot and monotonic | Linux 5.6 |
前面 6 种是比较常见的,后面两种 Cgroup Namespace 以及 Time Namespace 则是比较少见。
相关API
和 namespace 相关的函数只有四个,这里简单的看一下:
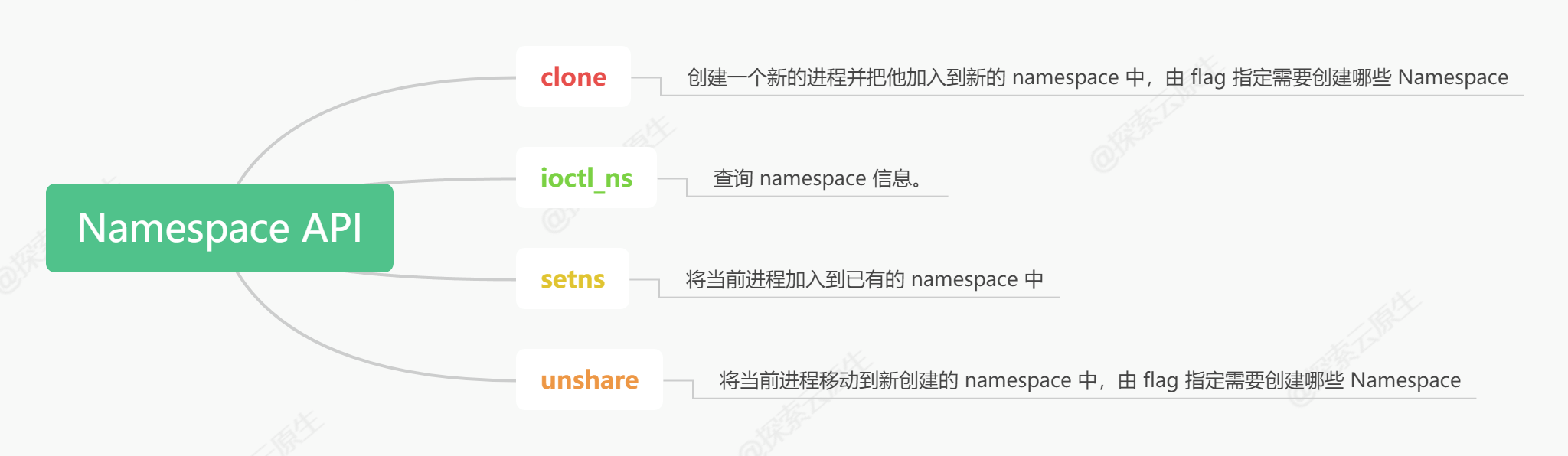
- clone
- setns
- unshare
- ioctl_ns
clone:创建一个新的进程并把他放到新的 namespace 中。
int clone(int (*fn)(void *), void *stack, int flags, void *arg, ...
/* pid_t *parent_tid, void *tls, pid_t *child_tid */ );
/*
flags:
指定一个或者多个上面的CLONE_NEW*(当然也可以包含跟namespace无关的flags),
这样就会创建一个或多个新的不同类型的namespace,
并把新创建的子进程加入新创建的这些namespace中。
*/
setns:将当前进程加入到已有的 namespace 中。
int setns(int fd, int nstype);
/*
fd:
指向/proc/[pid]/ns/目录里相应namespace对应的文件,
表示要加入哪个namespace
nstype:
指定namespace的类型(上面的任意一个CLONE_NEW*):
1. 如果当前进程不能根据fd得到它的类型,如fd由其他进程创建,
并通过UNIX domain socket传给当前进程,
那么就需要通过nstype来指定fd指向的namespace的类型
2. 如果进程能根据fd得到namespace类型,比如这个fd是由当前进程打开的,
那么nstype设置为0即可
*/
unshare:使当前进程退出指定类型的 namespace,并加入到新创建的 namespace(相当于创建并加入新的 namespace)。
int unshare(int flags);
/*
flags:
指定一个或者多个上面的CLONE_NEW*,
这样当前进程就退出了当前指定类型的namespace并加入到新创建的namespace
*/
ioctl_ns:查询 namespace 信息。
new_fd = ioctl(fd, request);
/*
fd: 指向/proc/[pid]/ns/目录里相应namespace对应的文件
request:
NS_GET_USERNS: 返回指向拥有用户的文件描述符namespace fd引用的命名空间
NS_GET_PARENT: 返回引用父级的文件描述符由fd引用的命名空间的命名空间。
*/
看完之后大致可以这样分类:
- clone、unshare:加入新 namespace
- setsns:加入已有 namespace
- ioctl_ns:主要用于查询
clone 和 unshare 都是加入新 namespace,二者有什么区别呢?
二者的功能都是创建并加入新的 namespace, 区别在于:
- unshare 是使 当前进程 加入新的 namespace
- clone 是创建一个新的子进程,然后让 子进程 加入新的 namespace,而当前进程保持不变
查看进程所属的 namespaces
系统中的每个进程都有
/proc/[pid]/ns/
这样一个目录,里面包含了这个进程所属 namespace 的信息,里面每个文件的描述符都可以用来作为 setns 函数(后面会介绍)的参数。
#查看当前bash进程所属的namespace
lixd ~ ls -l /proc/$$/ns
total 0
lrwxrwxrwx 1 lixd lixd 0 Jan 6 19:00 cgroup -> 'cgroup:[4026531835]'
lrwxrwxrwx 1 lixd lixd 0 Jan 6 19:00 ipc -> 'ipc:[4026532227]'
lrwxrwxrwx 1 lixd lixd 0 Jan 6 19:00 mnt -> 'mnt:[4026532241]'
lrwxrwxrwx 1 lixd lixd 0 Jan 6 19:00 net -> 'net:[4026531992]'
lrwxrwxrwx 1 lixd lixd 0 Jan 6 19:00 pid -> 'pid:[4026532243]'
lrwxrwxrwx 1 lixd lixd 0 Jan 6 19:00 pid_for_children -> 'pid:[4026532243]'
lrwxrwxrwx 1 lixd lixd 0 Jan 6 19:00 user -> 'user:[4026531837]'
lrwxrwxrwx 1 lixd lixd 0 Jan 6 19:00 uts -> 'uts:[4026532242]
以
ipc:[4026532227]
为例,其中 ipc 是 namespace 的类型,4026532227 是 inode number。
如果两个进程的 ipc namespace 的 inode number一样,说明他们属于同一个 namespace。
这条规则对其他类型的 namespace 也同样适用。
namespace 数量限制与回收策略
linux 也限制了 namespace 的数量,不能无限制的创建 namespace,具体限制一般在
/proc/sys/user
目录中。具体如下:
$ tree /proc/sys/user/
/proc/sys/user/
├── max_cgroup_namespaces
├── max_inotify_instances
├── max_inotify_watches
├── max_ipc_namespaces
├── max_mnt_namespaces
├── max_net_namespaces
├── max_pid_namespaces
├── max_user_namespaces
└── max_uts_namespaces
$ cat /proc/sys/user/max_pid_namespaces
6784
以看到,当前系统中 PID namespace 最多可以创建 6784 个。
既然数量有限制,那已经创建的 namespace 什么时候会被销毁回收呢?
规则还是比较好理解的:当一个 namespace 中的所有进程都结束或者移出该 namespace 时,该 namespace 将会被销毁。
这也解释了为什么没有创建 namespace 的 API,因为刚创建的 namespace 没有任何进程,立马就会被回收。
不过也有一些特殊情况,可以再没有进程的时候保留 namespace:
- 存在打开的 FD,或者对
/proc/[pid]/ns/*
执行了 bind mount - 存在子 namespace
- 它是一个拥有一个或多个非用户 namespace 的 namespace。
- 它是一个 PID namespace,并且有一个进程通过 /proc/[pid]/ns/pid_for_children 符号链接引用了这个 namespace。
- 它是一个 Time namespace,并且有一个进程通过 /proc/[pid]/ns/time_for_children 符号链接引用了这个 namespace。
- 它是一个 IPC namespace,并且有一个 mqueue 文件系统的 mount 引用了该 namespace
- 它是一个 PIDnamespace,并且有一个 proc 文件系统的 mount 引用了该 namespace
一句话描述:
当 namespace 有被使用时就不会被回收,反之则会被回收。
2. 使用 Go 语言操作 Linux 命名空间示例
UTS Namespace
UTS Namespace主要用来隔离nodename和domainname两个系统标识
。
在UTS Namespace里面,每个Namespace允许有自己的hostname.
以下程序展示了如何在 Go 中切换 UTS Namespace。
// 注: 运行时需要 root 权限。
func main() {
cmd := exec.Command("bash")
cmd.SysProcAttr = &syscall.SysProcAttr{
Cloneflags: syscall.CLONE_NEWUTS,
}
cmd.Stdin = os.Stdin
cmd.Stdout = os.Stdout
cmd.Stderr = os.Stderr
if err := cmd.Run(); err != nil {
log.Fatalln(err)
}
}
运行并测试
DESKTOP-9K4GB6E# go run main.go
root@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker#
运行后会进入了一个新的 shell 环境。
查看以下是否真的进入了新的 UTS Namespace。
首先使用
pstree
查看进程关系:
root@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker# pstree -pl
init(1)─┬─init(1272)───init(1273)───server(1274)─┬─{server}(1282)
│ ├─{server}(1283)
│ ├─{server}(1284)
│ ├─{server}(1285)
│ ├─{server}(1286)
│ ├─{server}(1287)
│ ├─{server}(1288)
│ └─{server}(1289)
├─init(3701)───init(3702)───zsh(3703)───su(7520)───bash(7521)───zsh(7575)───go(8104)─┬─main(8182)─┬─bash(8187)───pstree(8194)
│ │ ├─{main}(8183)
│ │ ├─{main}(8184)
│ │ ├─{main}(8185)
│ │ └─{main}(8186)
│ ├─{go}(8105)
│ ├─{go}(8106)
│ ├─{go}(8107)
│ ├─{go}(8108)
│ ├─{go}(8109)
│ ├─{go}(8110)
│ ├─{go}(8666666)
│ ├─{go}(8112)
│ ├─{go}(8117)
│ └─{go}(8143)
├─init(3763)───init(3764)───zsh(3765)
├─init(5171)───init(5172)───fsnotifier-wsl(5173)
├─init(7459)───init(7460)───bash(7461)───su(7476)───bash(7477)
├─{init}(5)
└─{init}(6)
主要关注这条:
├─init(3701)───init(3702)───zsh(3703)───su(7520)───bash(7521)───zsh(7575)───go(8104)─┬─main(8182)─┬─bash(8187)
main 程序 pid 为 8182,后续新创建的 bash pid 为 8187,现在查看二者 uts 是否相同即可:
root@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker# readlink /proc/8182/ns/uts
uts:[4026532242]
root@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker# readlink /proc/8187/ns/uts
uts:[4026532386]
可以发现二者确实不在一个 UTS Namespace 中。由于 UTS Namespace hostname 做了隔离 所以在这个环境内修改 hostname 应该不影响外部主机, 下面来做 下实验。
在这个新的 bash 环境中修改 hostname
root@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker# hostname bash
root@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker# hostname
bash
新开一个在宿主机上查看 hostname:
lixd ~ $ hostname
DESKTOP-9K4GB6E
可以看到外部的 hostname 并没有被修改影响,由此可了解 UTS Namespace 的作用。
IPC Namespace
IPC Namespace 用来隔离 sys V IPC和 POSIX message queues
。
每个 IPC Namespace 都有自己的 Sys V IPC 和 POSIX message queues。
微调一下程序,只是修改了 Cloneflags,新增了 CLONE_NEWIPC,表示同时创建 IPC Namespace。
// 注: 运行时需要 root 权限。
func main() {
cmd := exec.Command("bash")
cmd.SysProcAttr = &syscall.SysProcAttr{
// Cloneflags: syscall.CLONE_NEWUTS,
Cloneflags: syscall.CLONE_NEWUTS | syscall.CLONE_NEWIPC,
}
cmd.Stdin = os.Stdin
cmd.Stdout = os.Stdout
cmd.Stderr = os.Stderr
if err := cmd.Run(); err != nil {
log.Fatalln(err)
}
}
运行并测试:
# 先查看宿主机上的 ipc message queue
DESKTOP-9K4GB6E# ipcs -q
------ Message Queues --------
key msqid owner perms used-bytes messages
# 然后创建一个
DESKTOP-9K4GB6E# ipcmk -Q
Message queue id: 0
# 再次查看,发现有了
DESKTOP-9K4GB6E# ipcs -q
------ Message Queues --------
key msqid owner perms used-bytes messages
0x70ffd07c 0 root 644 0 0
运行程序进入新的 shell
DESKTOP-9K4GB6E# go run main.go
root@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker# ipcs -q
------ Message Queues --------
key msqid owner perms used-bytes messages
可以发现,在新的 Namespace 中已经看不到宿主机上的 message queue 了。说明 IPC Namespace 创建成功,IPC 已经被隔离。
PID Namespace
PID Namespace是用来隔离进程ID的
。
同样一个进程在不同的PID Namespace里可以拥有不同的PID。
这样就可以理解,在docker container 里面,使用ps -ef经常会发现,在容器内,前台运行的那个进程PID是1,但是在容器外,使用ps -ef会发现同样的进程却有不同的PID,这就是PID Namespace做的事情。
再次调整程序,增加 PID flags:
// 注: 运行时需要 root 权限。
func main() {
cmd := exec.Command("bash")
cmd.SysProcAttr = &syscall.SysProcAttr{
// Cloneflags: syscall.CLONE_NEWUTS,
// Cloneflags: syscall.CLONE_NEWUTS | syscall.CLONE_NEWIPC,
Cloneflags: syscall.CLONE_NEWUTS | syscall.CLONE_NEWIPC | syscall.CLONE_NEWPID,
}
cmd.Stdin = os.Stdin
cmd.Stdout = os.Stdout
cmd.Stderr = os.Stderr
if err := cmd.Run(); err != nil {
log.Fatalln(err)
}
}
运行并测试:
DESKTOP-9K4GB6E# go run main.go
root@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker# pstree -pl
init(1)─┬─init(1272)───init(1273)───server(1274)─┬─{server}(1282)
│ ├─{server}(1283)
│ ├─{server}(1284)
│ ├─{server}(1285)
│ ├─{server}(1286)
│ ├─{server}(1287)
│ ├─{server}(1288)
│ └─{server}(1289)
├─init(3701)───init(3702)───zsh(3703)───su(7520)───bash(7521)───zsh(7575)───go(9103)─┬─main(9184)─┬─bash(9189)───pstree(9196)
│ │ ├─{main}(9185)
│ │ ├─{main}(9186)
│ │ ├─{main}(9187)
│ │ └─{main}(9188)
│ ├─{go}(9104)
│ ├─{go}(9105)
│ ├─{go}(9106)
│ ├─{go}(9107)
│ ├─{go}(9108)
│ ├─{go}(9109)
│ ├─{go}(9110)
│ ├─{go}(9666666)
│ ├─{go}(9112)
│ └─{go}(9120)
├─init(3763)───init(3764)───zsh(3765)
├─init(5171)───init(5172)───fsnotifier-wsl(5173)
├─init(7459)───init(7460)───bash(7461)───su(7476)───bash(7477)
├─init(8201)───init(8202)───zsh(8203)
├─{init}(5)
└─{init}(6)
可以看到 main 函数 pid 为 9184,而新开的 bash pid 为 9189。
然后再新开的 bash 中查看自己的 pid:
这里只能使用
echo $$
命令查看,ps、top 等命令会查看到其他 Namespace 中的信息。
root@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker# echo $$
1
发现 pid 是1,说明再新开的 PID Namespace 中只有一个 bash 这个进程,而且被伪装成了 1 号进程。
Mount Namespace
Mount Namespace用来隔离各个进程看到的挂载点视图
。
在不同Namespace的进程中,看到的文件系统层次是不一样的。 在Mount Namespace中调用mount()和umount()仅仅只会影响当前Namespace内的文件系统,而对全局的文件系统是没有影响的。
看到这里,也许就会想到chroot(),它也是将某一个子目录变成根节点。但是,Mount Namespace不仅能实现这个功能,而且能以更加灵活和安全的方式实现。
需要注意的是,Mount Namespace 的 flag 是
CLONE_NEWNS
,直接是 NEWNS 而不是 NEWMOUNT,因为 Mount Namespace 是 Linux 中实现的第一个 Namespace,当时也没想到后续会有很多类型的 Namespace 加入。
再次修改代码,增加 Mount Namespace 的 flag
cmd.SysProcAttr = &syscall.SysProcAttr{
// Cloneflags: syscall.CLONE_NEWUTS,
// Cloneflags: syscall.CLONE_NEWUTS | syscall.CLONE_NEWIPC,
// Cloneflags: syscall.CLONE_NEWUTS | syscall.CLONE_NEWIPC | syscall.CLONE_NEWPID,
Cloneflags: syscall.CLONE_NEWUTS | syscall.CLONE_NEWIPC | syscall.CLONE_NEWPID | syscall.CLONE_NEWNS,
}
运行并测试:
首先运行程序并在新的 bash 环境中查看 /proc
DESKTOP-9K4GB6E# go run main.go
root@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker# ls /proc
1 3764 7476 9476 cmdline driver kallsyms loadavg net swaps vmallocinfo
1272 3765 7477 9557 config.gz execdomains kcore locks pagetypeinfo sys vmstat
1273 5171 7520 9562 consoles filesystems key-users mdstat partitions sysvipc zoneinfo
1274 5172 7521 9569 cpuinfo fs keys meminfo sched_debug thread-self
3701 5173 7575 acpi crypto interrupts kmsg misc schedstat timer_list
3702 7459 8201 buddyinfo devices iomem kpagecgroup modules self tty
3703 7460 8202 bus diskstats ioports kpagecount mounts softirqs uptime
3763 7461 8203 cgroups dma irq kpageflags mtrr stat version
可以看到,有一大堆文件,这是因为现在查看到的其实是宿主机上的 /proc 目录。
现在把 proc 目录挂载到当前 Namespace 中来:
root@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker# mount -t proc proc /proc
root@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker# ls /proc
1 cmdline diskstats interrupts key-users loadavg mounts schedstat sysvipc vmallocinfo
10 config.gz dma iomem keys locks mtrr self thread-self vmstat
acpi consoles driver ioports kmsg mdstat net softirqs timer_list zoneinfo
buddyinfo cpuinfo execdomains irq kpagecgroup meminfo pagetypeinfo stat tty
bus crypto filesystems kallsyms kpagecount misc partitions swaps uptime
cgroups devices fs kcore kpageflags modules sched_debug sys version
可以看到,少了一些文件,少的主要是数字命名的目录,因为当前 Namespace 下没有这些进程,自然就看不到对应的信息了。
此时就可以通过 ps 命令来查看了:
root@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker# ps -ef
UID PID PPID C STIME TTY TIME CMD
root 1 0 0 13:13 pts/2 00:00:00 bash
root 11 1 0 13:13 pts/2 00:00:00 ps -ef
可以看到,在当前 Namespace 中 bash 为 1 号进程。
这就说明,
当前 Mount Namespace 中的 mount 和外部是隔离的,mount 操作并没有影响到外部
,Docker volume 也是利用了这个特性。
User Namespace
User Narespace 主要是隔离用户的用户组ID
。
也就是说,一个进程的 UserID 和GroupID 在不同的 User Namespace 中可以是不同的。
比较常用的是,在宿主机上以一个非 root 用户运行创建一个 User Namespace, 然后在 User Namespace 里面却映射成 root 用户。这意味着,这个进程在 User Namespace 里面有 root 权限,但是在 User Namespace 外面却没有 root 的权限。
再次修改代码,增加 User Namespace 的 flag:
cmd.SysProcAttr = &syscall.SysProcAttr{
Cloneflags: syscall.CLONE_NEWUTS | syscall.CLONE_NEWIPC | syscall.CLONE_NEWPID | syscall.CLONE_NEWNS | syscall.CLONE_NEWUSER,
}
运行并测试:
首先在宿主机上查看一个 user 和 group:
DESKTOP-9K4GB6E# id
uid=0(root) gid=0(root) groups=0(root)
可以看到,此时是 root 用户。
运行程序,进入新的 bash 环境:
DESKTOP-9K4GB6E# go run main.go
nobody@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker$ id
uid=65534(nobody) gid=65534(nogroup) groups=65534(nogroup)
可以看到,UID 是不同的,说明 User Namespace 生效了。
Network Namespace
Network Namespace 是用来隔离网络设备、IP 地址端口等网络栈的 Namespace
。
Network Namespace 可以让每个容器拥有自己独立的(虛拟的)网络设备,而且容器内的应用可以绑定到自己的端口,每个 Namespace 内的端口都不会互相冲突。
在宿主机上搭建网桥后,就能很方便地实现容器之间的通信,而且不同容器上的应用可以使用相同的端口。
再次修改代码,增加 Network Namespace 的 flag:
cmd.SysProcAttr = &syscall.SysProcAttr{
Cloneflags: syscall.CLONE_NEWUTS | syscall.CLONE_NEWIPC | syscall.CLONE_NEWPID | syscall.CLONE_NEWNS |
syscall.CLONE_NEWUSER | syscall.CLONE_NEWNET,
}
运行并测试:
首先看一下宿主机上的网络设备:
DESKTOP-9K4GB6E# ip addr
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host
valid_lft forever preferred_lft forever
2: bond0: <BROADCAST,MULTICAST,MASTER> mtu 1500 qdisc noop state DOWN group default qlen 1000
link/ether 22:2f:1f:8e:f7:72 brd ff:ff:ff:ff:ff:ff
3: dummy0: <BROADCAST,NOARP> mtu 1500 qdisc noop state DOWN group default qlen 1000
link/ether 7e:46:8b:04:23:81 brd ff:ff:ff:ff:ff:ff
4: tunl0@NONE: <NOARP> mtu 1480 qdisc noop state DOWN group default qlen 1000
link/ipip 0.0.0.0 brd 0.0.0.0
5: sit0@NONE: <NOARP> mtu 1480 qdisc noop state DOWN group default qlen 1000
link/sit 0.0.0.0 brd 0.0.0.0
6: eth0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc mq state UP group default qlen 1000
link/ether 00:15:5d:6e:f2:65 brd ff:ff:ff:ff:ff:ff
inet 172.18.167.21/20 brd 172.18.175.255 scope global eth0
valid_lft forever preferred_lft forever
inet6 fe80::215:5dff:fe6e:f265/64 scope link
valid_lft forever preferred_lft forever
有 lo、eth0 等6 个设备。
然后运行程序:
DESKTOP-9K4GB6E# go run main.go
nobody@DESKTOP-9K4GB6E:/home/lixd/projects/docker/mydocker$ ip addr
1: lo: <LOOPBACK> mtu 65536 qdisc noop state DOWN group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
2: tunl0@NONE: <NOARP> mtu 1480 qdisc noop state DOWN group default qlen 1000
link/ipip 0.0.0.0 brd 0.0.0.0
3: sit0@NONE: <NOARP> mtu 1480 qdisc noop state DOWN group default qlen 1000
link/sit 0.0.0.0 brd 0.0.0.0
可以发现,新的 Namespace 中只有3个设备了,说明 Network Namespace 生效了。
3. 小结
- 0)Docker 使用 namespace 进行隔离。
- 1)
Namespace 的本质
:Linux Namespace 是 Linux 提供的
一种内核级别环境隔离的方法,本质就是对全局系统资源的一种封装隔离
。 - 2)
Namespace 的使用
:Namespace API 一共 4个,最常用的就是 clone,而 Go 已经把 clone 调用给封装好了,使用时只需要传入不同参数即可控制创建不同 Namespace。
如果你对云原生技术充满好奇,想要深入了解更多相关的文章和资讯,欢迎关注微信公众号。
搜索公众号【
探索云原生
】即可订阅