本文主要分享如何使用 GPU Operator 快速搭建 Kubernetes GPU 环境。
1. 概述
上一篇文章
GPU 使用指南:如何在裸机、Docker、K8s 等环境中使用 GPU
分享了裸机、Docker 环境以及 K8s 环境中如何使用 GPU。
整个流程还算比较简单,但是因为需要在节点上安装 GPU Driver、Container Toolkit 等组件,当集群规模较大时还是比较麻烦的。
为了解决这个问题,NVIDIA 推出了
GPU Operator
,
GPU Operator 旨在简化在 Kubernetes 环境中使用 GPU 的过程,通过自动化的方式处理 GPU 驱动程序安装、Controller Toolkit、Device-Plugin 、监控等组件
。
基本上把需要手动安装、配置的地方全部自动化处理了,极大简化了 k8s 环境中的 GPU 使用。
ps:只有 NVIDIA GPU 可以使用,其他厂家现在基本还是手动安装。
2. 组件介绍
这部分主要分析下 GPU Operator 涉及到的各个组件及其作用。
NVIDIA GPU Operator总共包含如下的几个组件:
- NFD(Node Feature Discovery)
:用于给节点打上某些标签,这些标签包括 cpu id、内核版本、操作系统版本、是不是 GPU 节点等,其中需要关注的标签是
nvidia.com/gpu.present=true
,如果节点存在该标签,那么说明该节点是 GPU 节点。
- GFD(GPU Feature Discovery)
:用于收集节点的 GPU 设备属性(GPU 驱动版本、GPU型号等),并将这些属性以节点标签的方式透出。在k8s 集群中以 DaemonSet 方式部署,只有节点拥有标签
nvidia.com/gpu.present=true
时,DaemonSet 控制的 Pod 才会在该节点上运行。
- NVIDIA Driver Installer
:基于容器的方式在节点上安装 NVIDIA GPU 驱动,在 k8s 集群中以 DaemonSet 方式部署,只有节点拥有标签
nvidia.com/gpu.present=true
时,DaemonSet 控制的 Pod 才会在该节点上运行。
- NVIDIA Container Toolkit Installer
:能够实现在容器中使用 GPU 设备,在 k8s 集群中以 DaemonSet 方式部署,同样的,只有节点拥有标签
nvidia.com/gpu.present=true
时,DaemonSet 控制的 Pod 才会在该节点上运行。
- NVIDIA Device Plugin
:NVIDIA Device Plugin 用于实现将 GPU 设备以 Kubernetes 扩展资源的方式供用户使用,在 k8s 集群中以 DaemonSet 方式部署,只有节点拥有标签
nvidia.com/gpu.present=true
时,DaemonSet 控制的 Pod 才会在该节点上运行。
- DCGM Exporter
:周期性的收集节点 GPU 设备的状态(当前温度、总的显存、已使用显存、使用率等)并暴露 Metrics,结合 Prometheus 和 Grafana 使用。在 k8s 集群中以DaemonSet 方式部署,只有节点拥有标签
nvidia.com/gpu.present=true
时,DaemonSet 控制的 Pod 才会在该节点上运行。
首先是 GFD、NFD,二者都是用于发现 Node 上的信息,并以 label 形式添加到 k8s node 对象上,特别是 GFD 会添加
nvidia.com/gpu.present=true
标签表示该节点有 GPU,只有携带该标签的节点才会安装后续组件。
然后则是 Driver Installer、Container Toolkit Installer 用于安装 GPU 驱动和 container toolkit。
接下来这是 device-plugin 让 k8s 能感知到 GPU 资源信息便于调度和管理。
最后的 exporter 则是采集 GPU 监控并以 Prometheus Metrics 格式暴露,用于做 GPU 监控。
这些组件基本就把需要手动配置的东西都自动化了。
NVIDIA GPU Operator 依如下的顺序部署各个组件,并且如果前一个组件部署失败,那么其后面的组件将停止部署:
- NVIDIA Driver Installer
- NVIDIA Container Toolkit Installer
- NVIDIA Device Plugin
- DCGM Exporter
- GFD
每个组件都是以 DaemonSet 方式部署,并且只有当节点存在标签 nvidia.com/gpu.present=true 时,各 DaemonSet控制的 Pod 才会在节点上运行。
nvidia.com/gpu.deploy.driver=pre-installed
GFD & NFD
根据名称基本能猜到这两个组件的功能,发现节点信息和 GPU 信息并以 Label 形式添加到 k8s 中的 node 对象上。
其中 NFD 添加的 label 以
feature.node.kubernetes.io
作为前缀,比如:
feature.node.kubernetes.io/cpu-cpuid.ADX=true
feature.node.kubernetes.io/system-os_release.ID=ubuntu
feature.node.kubernetes.io/system-os_release.VERSION_ID.major=22
feature.node.kubernetes.io/system-os_release.VERSION_ID.minor=04
feature.node.kubernetes.io/system-os_release.VERSION_ID=22.04
对于 GFD 则主要记录 GPU 信息
nvidia.com/cuda.runtime.major=12
nvidia.com/cuda.runtime.minor=2
nvidia.com/cuda.driver.major=535
nvidia.com/cuda.driver.minor=161
nvidia.com/gpu.product=Tesla-T4
nvidia.com/gpu.memory=15360
Driver Installer
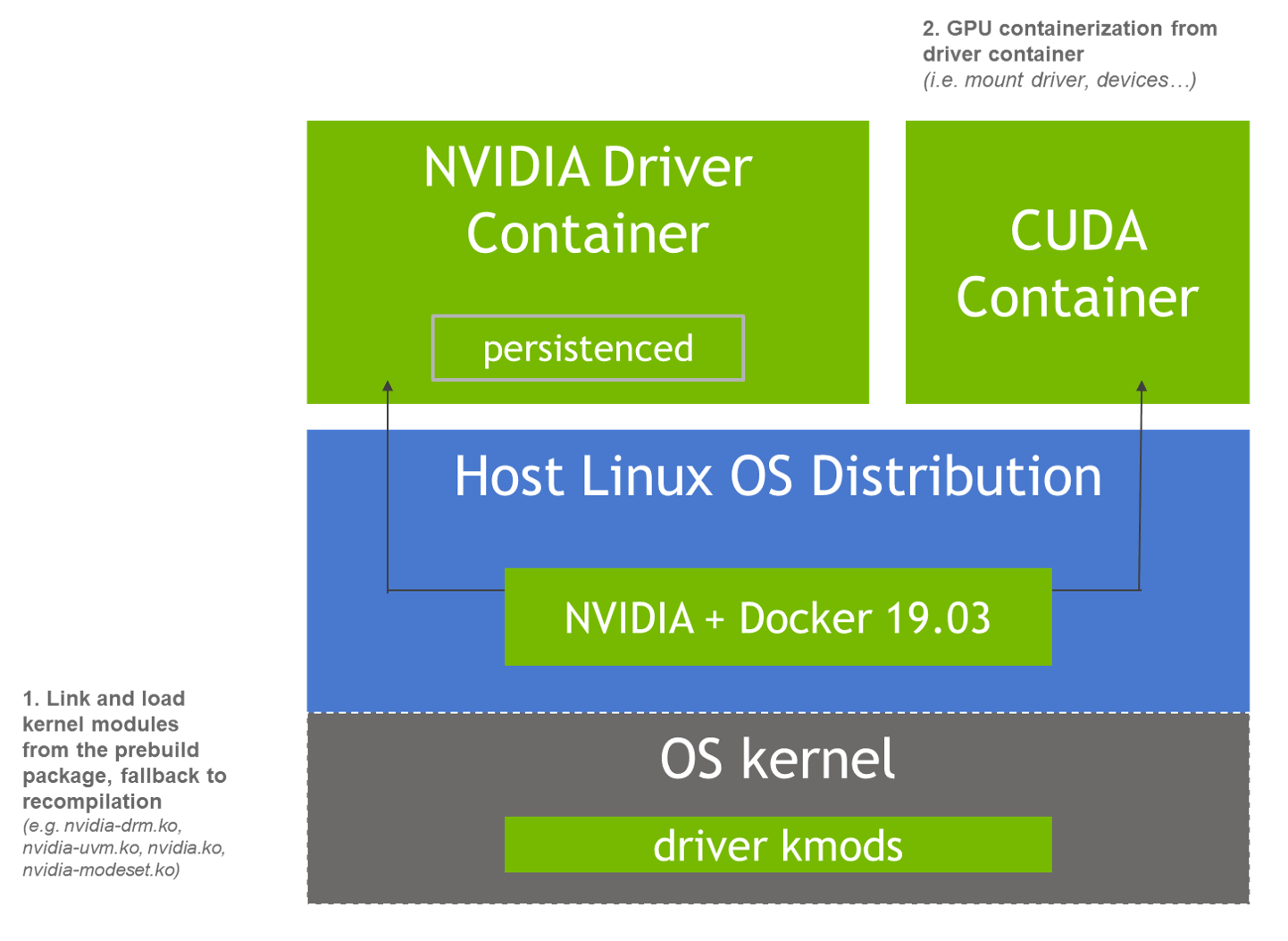
NVIDIA 官方提供了一种基于容器安装 NVIDIA 驱动的方式,GPU Operator 安装 nvidia 驱动也是采用的这种方式。
当 NVIDIA 驱动基于容器化安装后,整个架构将演变成图中描述的样子:
Driver Installer 组件对应的 DaemonSet 就是
nvidia-driver-daemonset-5.15.0-105-generic-ubuntu22.04
。
该 DaemonSet 对应的镜像为
root@test:~# kgo get ds nvidia-driver-daemonset-5.15.0-105-generic-ubuntu22.04 -oyaml|grep image
image: nvcr.io/nvidia/driver:535-5.15.0-105-generic-ubuntu22.04
其中 DaemonSet 名称/镜像由几部分组件:
- nvidia-driver-daemonset 这部分为前缀
- 5.15.0-105-generic 为内核版本,使用
uname -r
命令查看
- ubuntu22.04 操作系统版本,使用
cat /etc/os-release
命令查看
- 535:这个是 GPU Driver 的版本号,这里表示安装 535 版本驱动,在部署时可以指定。
GPU Operator 会自动根据节点上的内核版本和操作系统生成 DaemonSet 镜像,因为是以 DaemonSet 方式运行的,所有节点上都是跑的同一个 Pod,
因此要限制集群中的所有 GPU 节点操作系统和内核版本必须一致
。
ps:如果提前手动在节点上安装 GPU 驱动,那么 GPU Operator 检测到之后就不会在该节点上启动 Installer Pod,这样该节点就可以不需要管操作系统和内核版本。
该组件用于安装 NVIDIA Container Toolkit。
手动安装的时候有两个步骤:
- 1)安装 NVIDIA Container Toolkit
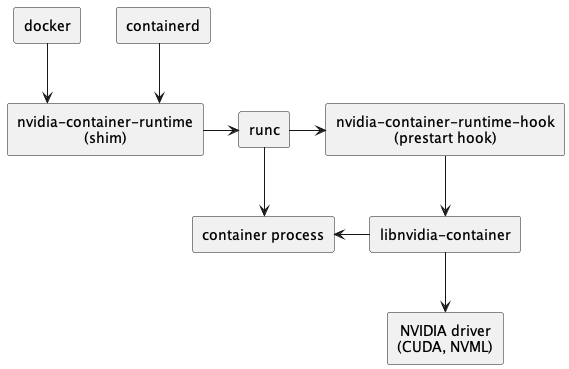
- 2)修改 Runtime 配置指定使用 nvidia-runtime
在整个调用链中新增 nvidia-container-runtime,以便处理 GPU 相关操作。
这个 Installer 做的操作也就是这两步:
- 1)将容器中NVIDIA Container Toolkit组件所涉及的命令行工具和库文件移动到/usr/local/nvidia/toolkit目录下
- 2)在 /usr/local/nvidia/toolkit/.config/nvidia-container-runtime创建nvidia-container-runtime的配置文件config.toml,并设置nvidia-container-cli.root的值为/run/nvidia/driver。
3. 部署
参考官方文档:
operator-install-guide
准备工作
要求:
1)GPU 节点必须运行相同的操作系统,
- 如果提前手动在节点上安装驱动的话,该节点可以使用不同的操作系统
- CPU 节点操作系统没要求,因为 gpu-operator 只会在 GPU 节点上运行
2)GPU 节点必须配置相同容器引擎,例如都是 containerd 或者都是 docker
3)如果使用了 Pod Security Admission (PSA) ,需要为 gpu-operator 标记特权模式
kubectl create ns gpu-operator
kubectl label --overwrite ns gpu-operator pod-security.kubernetes.io/enforce=privileged
4)集群中不要安装 NFD,如果已经安装了需要再安装 gpu-operator 时禁用 NFD 部署。
使用以下命令查看集群中是否部署 NFD
kubectl get nodes -o json | jq '.items[].metadata.labels | keys | any(startswith("feature.node.kubernetes.io"))'
如果返回 true 则说明集群中安装了 NFD。
使用 Helm 部署
官方文档:
operator-install-guide
# 添加 nvidia helm 仓库并更新
helm repo add nvidia https://helm.ngc.nvidia.com/nvidia \
&& helm repo update
# 以默认配置安装
helm install --wait --generate-name \
-n gpu-operator --create-namespace \
nvidia/gpu-operator
# 如果提前手动安装了 gpu 驱动,operator 中要禁止 gpu 安装
helm install --wait --generate-name \
-n gpu-operator --create-namespace \
nvidia/gpu-operator \
--set driver.enabled=false
完成后 会启动 Pod 安装驱动,如果节点上已经安装了驱动了,那么 gpu-operaotr 就不会启动安装驱动的 Pod,通过 label 进行筛选。
- 没安装驱动的节点会打上
nvidia.com/gpu.deploy.driver=true
,表示需要安装驱动
- 已经手动安装过驱动的节点会打上
nvidia.com/gpu.deploy.driver=pre-install
,Daemonset 则不会在该节点上运行
当然,并不是每个操作系统+内核版本的组合,NVIDIA 都提供了对应的镜像,可以提前在
NVIDIA/driver tags
查看当前 NVIDIA 提供的驱动版本。
测试
部署后,会在
gpu-operator
namespace 下启动相关 Pod,查看一下 Pod 的运行情况,除了一个
Completed
之外其他应该都是 Running 状态。
root@test:~# kubectl -n gpu-operator get po
NAME READY STATUS RESTARTS AGE
gpu-feature-discovery-jdqpb 1/1 Running 0 35d
gpu-operator-67f8b59c9b-k989m 1/1 Running 6 (35d ago) 35d
nfd-node-feature-discovery-gc-5644575d55-957rp 1/1 Running 6 (35d ago) 35d
nfd-node-feature-discovery-master-5bd568cf5c-c6t9s 1/1 Running 6 (35d ago) 35d
nfd-node-feature-discovery-worker-sqb7x 1/1 Running 6 (35d ago) 35d
nvidia-container-toolkit-daemonset-rqgtv 1/1 Running 0 35d
nvidia-cuda-validator-9kqnf 0/1 Completed 0 35d
nvidia-dcgm-exporter-8mb6v 1/1 Running 0 35d
nvidia-device-plugin-daemonset-7nkjw 1/1 Running 0 35d
nvidia-driver-daemonset-5.15.0-105-generic-ubuntu22.04-g5dgx 1/1 Running 5 (35d ago) 35d
nvidia-operator-validator-6mqlm 1/1 Running 0 35d
然后进入
nvidia-driver-daemonset-xxx
Pod,该 Pod 负责 GPU Driver 的安装,在该 Pod 中可以执行
nvidia-smi
命令,比如查看 GPU 信息:
root@j99cloudvm:~# kubectl -n gpu-operator exec -it nvidia-driver-daemonset-5.15.0-105-generic-ubuntu22.04-g5dgx -- nvidia-smi
Defaulted container "nvidia-device-plugin" out of: nvidia-device-plugin, config-manager, toolkit-validation (init), config-manager-init (init)
Wed Jul 17 01:49:35 2024
+-----------------------------------------------------------------------------+
| NVIDIA-SMI 525.147.05 Driver Version: 525.147.05 CUDA Version: 12.0 |
|-------------------------------+----------------------+----------------------+
| GPU Name Persistence-M| Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap| Memory-Usage | GPU-Util Compute M. |
| | | MIG M. |
|===============================+======================+======================|
| 0 NVIDIA A40 Off | 00000000:00:07.0 Off | 0 |
| 0% 46C P0 88W / 300W | 484MiB / 46068MiB | 0% Default |
| | | N/A |
+-------------------------------+----------------------+----------------------+
| 1 NVIDIA A40 Off | 00000000:00:08.0 Off | 0 |
| 0% 48C P0 92W / 300W | 40916MiB / 46068MiB | 0% Default |
| | | N/A |
+-------------------------------+----------------------+----------------------+
+-----------------------------------------------------------------------------+
| Processes: |
| GPU GI CI PID Type Process name GPU Memory |
| ID ID Usage |
|=============================================================================|
+-----------------------------------------------------------------------------+
最后再查看 Pod 信息
$ kubectl get node xxx -oyaml
status:
addresses:
- address: 172.18.187.224
type: InternalIP
- address: izj6c5dnq07p1ic04ei9vwz
type: Hostname
allocatable:
cpu: "4"
ephemeral-storage: "189889991571"
hugepages-1Gi: "0"
hugepages-2Mi: "0"
memory: 15246720Ki
nvidia.com/gpu: "1"
pods: "110"
capacity:
cpu: "4"
ephemeral-storage: 206043828Ki
hugepages-1Gi: "0"
hugepages-2Mi: "0"
memory: 15349120Ki
nvidia.com/gpu: "1"
pods: "110"
确认 capacity 是否包含 GPU,正常应该是有的,比如这样:
capacity:
nvidia.com/gpu: "1"
至此,说明我们的 GPU Operator 已经安装成功,K8s 也能感知到节点上的 GPU,接下来就可以在 Pod 中使用 GPU 了。
创建一个测试 Pod,申请一个 GPU:
apiVersion: v1
kind: Pod
metadata:
name: cuda-vectoradd
spec:
restartPolicy: OnFailure
containers:
- name: cuda-vectoradd
image: "nvcr.io/nvidia/k8s/cuda-sample:vectoradd-cuda11.7.1-ubuntu20.04"
resources:
limits:
nvidia.com/gpu: 1
正常的 Pod 日志如下:
$ kubectl logs pod/cuda-vectoradd
[Vector addition of 50000 elements]
Copy input data from the host memory to the CUDA device
CUDA kernel launch with 196 blocks of 256 threads
Copy output data from the CUDA device to the host memory
Test PASSED
Done
至此,我们已经可以在 k8s 中使用 GPU 了。
【Kubernetes 系列】
持续更新中,搜索公众号【
探索云原生
】订阅,阅读更多文章。

4. 原理
这部分主要分析一下 Driver Installer 和 NVIDIA Container Toolkit Installer 这两个组件是怎么实现的,大致原理。
Driver Installer
NVIDIA 官方提供了一种基于容器安装 NVIDIA 驱动的方式,GPU Operator 安装 nvidia 驱动也是采用的这种方式。
当 NVIDIA 驱动基于容器化安装后,整个架构将演变成图中描述的样子:
安装
Driver Installer 组件对应的 DaemonSet 就是
nvidia-driver-daemonset-5.15.0-105-generic-ubuntu22.04
。
该 DaemonSet 对应的镜像为
root@test:~# kgo get ds nvidia-driver-daemonset-5.15.0-105-generic-ubuntu22.04 -oyaml|grep image
image: nvcr.io/nvidia/driver:535-5.15.0-105-generic-ubuntu22.04
其中 DaemonSet 名称/镜像由几部分组件:
- nvidia-driver-daemonset 这部分为前缀
- 5.15.0-105-generic 为内核版本,使用
uname -r
命令查看
- ubuntu22.04 操作系统版本,使用
cat /etc/os-release
命令查看
- 535:这个是 GPU Driver 的版本号,这里表示安装 535 版本驱动,在部署时可以指定。
查看一下 Pod 日志:
root@test:~# kubectl -n gpu-operaator logs -f nvidia-driver-daemonset-5.15.0-105-generic-ubuntu22.04-g5dgx
========== NVIDIA Software Installer ==========
Starting installation of NVIDIA driver branch 535 for Linux kernel version 5.15.0-105-generic
Stopping NVIDIA persistence daemon...
Unloading NVIDIA driver kernel modules...
Unmounting NVIDIA driver rootfs...
Installing NVIDIA driver kernel modules...
Reading package lists...
Building dependency tree...
Reading state information...
The following packages were automatically installed and are no longer required:
...
Setting up linux-modules-nvidia-535-server-5.15.0-105-generic (5.15.0-105.115+1) ...
linux-image-nvidia-5.15.0-105-generic: constructing .ko files
nvidia-drm.ko: OK
nvidia-modeset.ko: OK
nvidia-peermem.ko: OK
nvidia-uvm.ko: OK
nvidia.ko: OK
Processing triggers for linux-image-5.15.0-105-generic (5.15.0-105.115) ...
/etc/kernel/postinst.d/dkms:
* dkms: running auto installation service for kernel 5.15.0-105-generic
...done.
Parsing kernel module parameters...
Loading ipmi and i2c_core kernel modules...
Loading NVIDIA driver kernel modules...
+ modprobe nvidia
+ modprobe nvidia-uvm
+ modprobe nvidia-modeset
+ set +o xtrace -o nounset
Starting NVIDIA persistence daemon...
Mounting NVIDIA driver rootfs...
Done, now waiting for signal
可以看到,先是在安装驱动,安装完成后又加载了一些内核模块。
为了实现在容器中安装驱动,该 Pod 通过 hostPath 将安装驱动相关的目录都挂载到容器中了,
volumes:
- hostPath:
path: /run/nvidia
type: DirectoryOrCreate
name: run-nvidia
- hostPath:
path: /etc/os-release
type: ""
name: host-os-release
- hostPath:
path: /run/nvidia-topologyd
type: DirectoryOrCreate
name: run-nvidia-topologyd
name: run-mellanox-drivers
- hostPath:
path: /run/nvidia/validations
type: DirectoryOrCreate
name: run-nvidia-validations
- hostPath:
path: /sys
type: Directory
镜像构建
根据 Dockerfile 来看下镜像是怎么构建的,以 CentOS8 的 Dockerfile 为例
文件来自:
https://gitlab.com/nvidia/container-images/driver/-/blob/master/centos8/Dockerfile
FROM nvidia/cuda:11.4.1-base-centos8
ENV NVIDIA_VISIBLE_DEVICES=void
RUN NVIDIA_GPGKEY_SUM=d0664fbbdb8c32356d45de36c5984617217b2d0bef41b93ccecd326ba3b80c87 && \
curl -fsSL https://developer.download.nvidia.com/compute/cuda/repos/rhel8/x86_64/D42D0685.pub | sed '/^Version/d' > /etc/pki/rpm-gpg/RPM-GPG-KEY-NVIDIA && \
echo "$NVIDIA_GPGKEY_SUM /etc/pki/rpm-gpg/RPM-GPG-KEY-NVIDIA" | sha256sum -c --strict -
#首先安装一些依赖
RUN dnf install -y \
ca-certificates \
curl \
gcc \
glibc.i686 \
make \
dnf-utils \
kmod && \
rm -rf /var/cache/dnf/*
RUN curl -fsSL -o /usr/local/bin/donkey https://github.com/3XX0/donkey/releases/download/v1.1.0/donkey && \
curl -fsSL -o /usr/local/bin/extract-vmlinux https://raw.githubusercontent.com/torvalds/linux/master/scripts/extract-vmlinux && \
chmod +x /usr/local/bin/donkey /usr/local/bin/extract-vmlinux
#ARG BASE_URL=http://us.download.nvidia.com/XFree86/Linux-x86_64
ARG BASE_URL=https://us.download.nvidia.com/tesla
ARG DRIVER_VERSION
ENV DRIVER_VERSION=$DRIVER_VERSION
# 然后下载驱动文件并安装,注意 --no-kernel-module,这里只安装了 userspace 部分
RUN cd /tmp && \
curl -fSsl -O $BASE_URL/$DRIVER_VERSION/NVIDIA-Linux-x86_64-$DRIVER_VERSION.run && \
sh NVIDIA-Linux-x86_64-$DRIVER_VERSION.run -x && \
cd NVIDIA-Linux-x86_64-$DRIVER_VERSION && \
./nvidia-installer --silent \
--no-kernel-module \
--install-compat32-libs \
--no-nouveau-check \
--no-nvidia-modprobe \
--no-rpms \
--no-backup \
--no-check-for-alternate-installs \
--no-libglx-indirect \
--no-install-libglvnd \
--x-prefix=/tmp/null \
--x-module-path=/tmp/null \
--x-library-path=/tmp/null \
--x-sysconfig-path=/tmp/null && \
mkdir -p /usr/src/nvidia-$DRIVER_VERSION && \
mv LICENSE mkprecompiled kernel /usr/src/nvidia-$DRIVER_VERSION && \
sed '9,${/^\(kernel\|LICENSE\)/!d}' .manifest > /usr/src/nvidia-$DRIVER_VERSION/.manifest && \
rm -rf /tmp/*
COPY nvidia-driver /usr/local/bin
WORKDIR /usr/src/nvidia-$DRIVER_VERSION
ARG PUBLIC_KEY=empty
COPY ${PUBLIC_KEY} kernel/pubkey.x509
ARG PRIVATE_KEY
# Remove cuda repository to avoid GPG errors
RUN rm -f /etc/yum.repos.d/cuda.repo
# Add NGC DL license from the CUDA image
RUN mkdir /licenses && mv /NGC-DL-CONTAINER-LICENSE /licenses/NGC-DL-CONTAINER-LICENSE
ENTRYPOINT ["nvidia-driver", "init"]
最后执行的
nvidia-driver
是一个脚本文件,init 部分内容如下:
init() {
echo -e "\n========== NVIDIA Software Installer ==========\n"
echo -e "Starting installation of NVIDIA driver version ${DRIVER_VERSION} for Linux kernel version ${KERNEL_VERSION}\n"
exec 3> ${PID_FILE}
if ! flock -n 3; then
echo "An instance of the NVIDIA driver is already running, aborting"
exit 1
fi
echo $$ >&3
trap "echo 'Caught signal'; exit 1" HUP INT QUIT PIPE TERM
trap "_shutdown" EXIT
_unload_driver || exit 1
_unmount_rootfs
if _kernel_requires_package; then
_update_package_cache
_resolve_kernel_version || exit 1
_install_prerequisites
_create_driver_package
#_remove_prerequisites
_cleanup_package_cache
fi
_install_driver
_load_driver
_mount_rootfs
_write_kernel_update_hook
echo "Done, now waiting for signal"
sleep infinity &
trap "echo 'Caught signal'; _shutdown && { kill $!; exit 0; }" HUP INT QUIT PIPE TERM
trap - EXIT
while true; do wait $! || continue; done
exit 0
}
然后
_install_driver
部分在安装驱动,因为之前构建镜像时就安装了 userspace 部分,因此这里指定了
--kernel-module-only
来限制安装驱动部分。
这也是为什么容器方式安装很快,因为在构建镜像时就不 驱动的 userspace 部分安装好了。
# Link and install the kernel modules from a precompiled package using the nvidia-installer.
_install_driver() {
local install_args=()
echo "Installing NVIDIA driver kernel modules..."
cd /usr/src/nvidia-${DRIVER_VERSION}
rm -rf /lib/modules/${KERNEL_VERSION}/video
if [ "${ACCEPT_LICENSE}" = "yes" ]; then
install_args+=("--accept-license")
fi
nvidia-installer --kernel-module-only --no-drm --ui=none --no-nouveau-check ${install_args[@]+"${install_args[@]}"}
}
_load_driver
加载相关内核模块
# Load the kernel modules and start persistenced.
_load_driver() {
echo "Loading ipmi and i2c_core kernel modules..."
modprobe -a i2c_core ipmi_msghandler ipmi_devintf
echo "Loading NVIDIA driver kernel modules..."
modprobe -a nvidia nvidia-uvm nvidia-modeset
echo "Starting NVIDIA persistence daemon..."
nvidia-persistenced --persistence-mode
}
_mount_rootfs
将驱动程序挂载到 /var/run 目录下
# Mount the driver rootfs into the run directory with the exception of sysfs.
_mount_rootfs() {
echo "Mounting NVIDIA driver rootfs..."
mount --make-runbindable /sys
mount --make-private /sys
mkdir -p ${RUN_DIR}/driver
mount --rbind / ${RUN_DIR}/driver
}
这就是驱动安装的部分流程,和我们看到的 Pod 日志也是匹配的。
卸载的话就是相反的操作了。
该组件用于安装 NVIDIA Container Toolkit。
手动安装的时候有两个步骤:
- 1)安装 NVIDIA Container Toolkit
- 2)修改 Runtime 配置指定使用 nvidia-runtime
在整个调用链中新增 nvidia-container-runtime,以便处理 GPU 相关操作。
这个 Installer 做的操作也就是这两步:
- 1)将容器中NVIDIA Container Toolkit组件所涉及的命令行工具和库文件移动到/usr/local/nvidia/toolkit目录下
- 2)在 /usr/local/nvidia/toolkit/.config/nvidia-container-runtime创建nvidia-container-runtime的配置文件config.toml,并设置nvidia-container-cli.root的值为/run/nvidia/driver。
安装
该 Installer 对应的 DaemonSet 为
nvidia-container-toolkit-daemonset
。
Pod 启动命令如下:
containers:
- args:
- /bin/entrypoint.sh
command:
- /bin/bash
- -c
这个
entrypoint.sh
内容存放在
nvidia-container-toolkit-entrypoint
Configmap 中,内容如下:
apiVersion: v1
data:
entrypoint.sh: |-
#!/bin/bash
set -e
driver_root=/run/nvidia/driver
driver_root_ctr_path=$driver_root
if [[ -f /run/nvidia/validations/host-driver-ready ]]; then
driver_root=/
driver_root_ctr_path=/host
fi
export NVIDIA_DRIVER_ROOT=$driver_root
export DRIVER_ROOT_CTR_PATH=$driver_root_ctr_path
#
# The below delay is a workaround for an issue affecting some versions
# of containerd starting with 1.6.9. Staring with containerd 1.6.9 we
# started seeing the toolkit container enter a crashloop whereby it
# would recieve a SIGTERM shortly after restarting containerd.
#
# Refer to the commit message where this workaround was implemented
# for additional details:
# https://github.com/NVIDIA/gpu-operator/commit/963b8dc87ed54632a7345c1fcfe842f4b7449565
#
sleep 5
exec nvidia-toolkit
设置了驱动相关环境变量,真正执行配置的是
exec nvidia-toolkit
这一句。
该同样使用 hostPath 方式把宿主机目录挂载到容器中,便于对宿主机上的内容进行修改。
volumes:
- hostPath:
path: /run/nvidia
type: DirectoryOrCreate
name: nvidia-run-path
- hostPath:
path: /run/nvidia/validations
type: DirectoryOrCreate
name: run-nvidia-validations
- hostPath:
path: /run/nvidia/driver
type: ""
name: driver-install-path
name: host-root
- hostPath:
path: /usr/local/nvidia
type: ""
name: toolkit-install-dir
- hostPath:
path: /run/containers/oci/hooks.d
type: ""
name: crio-hooks
- hostPath:
path: /dev/char
type: ""
name: host-dev-char
- hostPath:
path: /var/run/cdi
type: DirectoryOrCreate
name: cdi-root
- hostPath:
path: /etc/docker
type: DirectoryOrCreate
name: docker-config
- hostPath:
path: /var/run
type: ""
name: docker-socket
查看 Pod 日志,看看安装流程
root@test:~# kubectl -n gpu-operator logs -f nvidia-container-toolkit-daemonset-rqgtv
# 安装 container toolkit
time="2024-06-12T02:07:58Z" level=info msg="Parsing arguments"
time="2024-06-12T02:07:58Z" level=info msg="Starting nvidia-toolkit"
time="2024-06-12T02:07:58Z" level=info msg="Verifying Flags"
time="2024-06-12T02:07:58Z" level=info msg=Initializing
time="2024-06-12T02:07:58Z" level=info msg="Installing toolkit"
time="2024-06-12T02:07:58Z" level=info msg="Installing NVIDIA container toolkit to '/usr/local/nvidia/toolkit'"
# 修改配置
time="2024-06-12T02:07:58Z" level=info msg="Installing NVIDIA container toolkit config '/usr/local/nvidia/toolkit/.config/nvidia-container-runtime/config.toml'"
time="2024-06-12T02:07:58Z" level=info msg="Skipping unset option: nvidia-container-runtime.debug"
time="2024-06-12T02:07:58Z" level=info msg="Skipping unset option: nvidia-container-runtime.log-level"
time="2024-06-12T02:07:58Z" level=info msg="Skipping unset option: nvidia-container-runtime.mode"
time="2024-06-12T02:07:58Z" level=info msg="Skipping unset option: nvidia-container-runtime.modes.cdi.annotation-prefixes"
time="2024-06-12T02:07:58Z" level=info msg="Skipping unset option: nvidia-container-runtime.runtimes"
time="2024-06-12T02:07:58Z" level=info msg="Skipping unset option: nvidia-container-cli.debug"
Using config:
accept-nvidia-visible-devices-as-volume-mounts = false
accept-nvidia-visible-devices-envvar-when-unprivileged = true
disable-require = false
[nvidia-container-cli]
environment = []
ldconfig = "@/run/nvidia/driver/sbin/ldconfig.real"
load-kmods = true
path = "/usr/local/nvidia/toolkit/nvidia-container-cli"
root = "/run/nvidia/driver"
[nvidia-container-runtime]
log-level = "info"
mode = "auto"
runtimes = ["docker-runc", "runc"]
[nvidia-container-runtime.modes]
[nvidia-container-runtime.modes.cdi]
default-kind = "management.nvidia.com/gpu"
[nvidia-container-runtime.modes.csv]
mount-spec-path = "/etc/nvidia-container-runtime/host-files-for-container.d"
[nvidia-container-runtime-hook]
path = "/usr/local/nvidia/toolkit/nvidia-container-runtime-hook"
skip-mode-detection = true
[nvidia-ctk]
path = "/usr/local/nvidia/toolkit/nvidia-ctk"
time="2024-06-12T02:07:58Z" level=info msg="Setting up runtime"
time="2024-06-12T02:07:58Z" level=info msg="Parsing arguments: [/usr/local/nvidia/toolkit]"
time="2024-06-12T02:07:58Z" level=info msg="Successfully parsed arguments"
time="2024-06-12T02:07:58Z" level=info msg="Starting 'setup' for docker"
time="2024-06-12T02:07:58Z" level=info msg="Loading docker config from /runtime/config-dir/daemon.json"
time="2024-06-12T02:07:58Z" level=info msg="Successfully loaded config"
time="2024-06-12T02:07:58Z" level=info msg="Flushing config to /runtime/config-dir/daemon.json"
和手动安装类似,分为两步。
查看宿主机上 Docker 的配置文件,也确实是被修改过的,default-runtime 改成了 nvidia。
root@test:~# cat /etc/docker/daemon.json
{
"data-root": "/var/lib/docker",
"default-runtime": "nvidia",
"exec-opts": [
"native.cgroupdriver=systemd"
],
"log-driver": "json-file",
"log-opts": {
"max-file": "3",
"max-size": "100m"
},
"registry-mirrors": [
"https://docker.chenby.cn"
],
"runtimes": {
"nvidia": {
"args": [],
"path": "/usr/local/nvidia/toolkit/nvidia-container-runtime"
},
"nvidia-cdi": {
"args": [],
"path": "/usr/local/nvidia/toolkit/nvidia-container-runtime.cdi"
},
"nvidia-experimental": {
"args": [],
"path": "/usr/local/nvidia/toolkit/nvidia-container-runtime.experimental"
},
"nvidia-legacy": {
"args": [],
"path": "/usr/local/nvidia/toolkit/nvidia-container-runtime.legacy"
}
},
"storage-driver": "overlay2",
"storage-opts": [
"overlay2.override_kernel_check=true"
]
}
这就是 NVIDIA Container Toolkit Installer 的安装部分,具体代码实现可以看下一节 镜像构建 部分。
镜像构建
Installer 代码合并到了
nvidia-container-toolkit 仓库 tools 目录
,分别为不同的 Runtime 做了不同的实现,比如 Containerd 的实现就在
containerd.go
中,部分代码如下:
// Setup updates a containerd configuration to include the nvidia-containerd-runtime and reloads it
func Setup(c *cli.Context, o *options) error {
log.Infof("Starting 'setup' for %v", c.App.Name)
cfg, err := containerd.New(
containerd.WithPath(o.Config),
containerd.WithRuntimeType(o.runtimeType),
containerd.WithUseLegacyConfig(o.useLegacyConfig),
containerd.WithContainerAnnotations(o.containerAnnotationsFromCDIPrefixes()...),
)
if err != nil {
return fmt.Errorf("unable to load config: %v", err)
}
runtimeConfigOverride, err := o.runtimeConfigOverride()
if err != nil {
return fmt.Errorf("unable to parse config overrides: %w", err)
}
err = o.Configure(cfg, runtimeConfigOverride)
if err != nil {
return fmt.Errorf("unable to configure containerd: %v", err)
}
err = RestartContainerd(o)
if err != nil {
return fmt.Errorf("unable to restart containerd: %v", err)
}
log.Infof("Completed 'setup' for %v", c.App.Name)
return nil
}
// Cleanup reverts a containerd configuration to remove the nvidia-containerd-runtime and reloads it
func Cleanup(c *cli.Context, o *options) error {
log.Infof("Starting 'cleanup' for %v", c.App.Name)
cfg, err := containerd.New(
containerd.WithPath(o.Config),
containerd.WithRuntimeType(o.runtimeType),
containerd.WithUseLegacyConfig(o.useLegacyConfig),
containerd.WithContainerAnnotations(o.containerAnnotationsFromCDIPrefixes()...),
)
if err != nil {
return fmt.Errorf("unable to load config: %v", err)
}
err = o.Unconfigure(cfg)
if err != nil {
return fmt.Errorf("unable to unconfigure containerd: %v", err)
}
err = RestartContainerd(o)
if err != nil {
return fmt.Errorf("unable to restart containerd: %v", err)
}
log.Infof("Completed 'cleanup' for %v", c.App.Name)
return nil
}
其中
- Setup 为修改 Runtime 配置,增加 nvidia runtime
- Cleanup 则是取消 Runtime 配置中 nvidia runtime
对应的
Dockerfile
内容如下:
# Copyright (c) 2019-2021, NVIDIA CORPORATION. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
ARG GOLANG_VERSION=x.x.x
ARG VERSION="N/A"
FROM nvidia/cuda:12.5.1-base-ubi8 as build
RUN yum install -y \
wget make git gcc \
&& \
rm -rf /var/cache/yum/*
ARG GOLANG_VERSION=x.x.x
RUN set -eux; \
\
arch="$(uname -m)"; \
case "${arch##*-}" in \
x86_64 | amd64) ARCH='amd64' ;; \
ppc64el | ppc64le) ARCH='ppc64le' ;; \
aarch64 | arm64) ARCH='arm64' ;; \
*) echo "unsupported architecture" ; exit 1 ;; \
esac; \
wget -nv -O - https://storage.googleapis.com/golang/go${GOLANG_VERSION}.linux-${ARCH}.tar.gz \
| tar -C /usr/local -xz
ENV GOPATH /go
ENV PATH $GOPATH/bin:/usr/local/go/bin:$PATH
WORKDIR /build
COPY . .
# NOTE: Until the config utilities are properly integrated into the
# nvidia-container-toolkit repository, these are built from the `tools` folder
# and not `cmd`.
RUN GOPATH=/artifacts go install -ldflags="-s -w -X 'main.Version=${VERSION}'" ./tools/...
FROM nvidia/cuda:12.5.1-base-ubi8
ENV NVIDIA_DISABLE_REQUIRE="true"
ENV NVIDIA_VISIBLE_DEVICES=void
ENV NVIDIA_DRIVER_CAPABILITIES=utility
ARG ARTIFACTS_ROOT
ARG PACKAGE_DIST
COPY ${ARTIFACTS_ROOT}/${PACKAGE_DIST} /artifacts/packages/${PACKAGE_DIST}
WORKDIR /artifacts/packages
ARG PACKAGE_VERSION
ARG TARGETARCH
ENV PACKAGE_ARCH ${TARGETARCH}
RUN PACKAGE_ARCH=${PACKAGE_ARCH/amd64/x86_64} && PACKAGE_ARCH=${PACKAGE_ARCH/arm64/aarch64} && \
yum localinstall -y \
${PACKAGE_DIST}/${PACKAGE_ARCH}/libnvidia-container1-1.*.rpm \
${PACKAGE_DIST}/${PACKAGE_ARCH}/libnvidia-container-tools-1.*.rpm \
${PACKAGE_DIST}/${PACKAGE_ARCH}/nvidia-container-toolkit*-${PACKAGE_VERSION}*.rpm
WORKDIR /work
COPY --from=build /artifacts/bin /work
ENV PATH=/work:$PATH
LABEL io.k8s.display-name="NVIDIA Container Runtime Config"
LABEL name="NVIDIA Container Runtime Config"
LABEL vendor="NVIDIA"
LABEL version="${VERSION}"
LABEL release="N/A"
LABEL summary="Automatically Configure your Container Runtime for GPU support."
LABEL description="See summary"
RUN mkdir /licenses && mv /NGC-DL-CONTAINER-LICENSE /licenses/NGC-DL-CONTAINER-LICENSE
ENTRYPOINT ["/work/nvidia-toolkit"]
这部分比较简单,就是编译生成二进制文件,以及安装部分依赖的 RPM 包。
【Kubernetes 系列】
持续更新中,搜索公众号【
探索云原生
】订阅,阅读更多文章。
5. 小结
本文主要分享如何使用 GPU Operator 自动化完成 GPU Driver、NVIDIA Container Toolkit、device-plugin、exporter 等组件的部署,快速实现在 k8s 环境中使用 GPU。
最后简单分析了 Driver Installer 和 NVIDIA Container Toolkit Installer 这两个组件的工作原理。
GPU Operator 极大简化了在 k8s 中使用 GPU 的繁琐过程,但是也存在一些缺点:
- Driver Installer 以 DaemonSet 方式运行的,每个节点上运行的 Pod 都一样,但是镜像由 驱动版本+内核版本+操作系统版本拼接而成,因此
需要集群中所有节点操作系统一致
。
- NVIDIA Container Toolkit Installer 同样是以 DaemonSet 方式运行的,另外安装时需要指定 Runtime,这也
造成了集群的节点必须安装相同的 Container Runtime
。
6. 参考
gpu-operator getting-started
About the NVIDIA GPU Operator
nvidia-container-toolkit
NVIDIA GPU Operator分析一:NVIDIA驱动安装