Verilog5_有限状态机
一、有限状态机(Finite State Machine, FSM)基本概念
有限状态机是由
寄存器组
和
组合逻辑
构成的硬件时序电路;
其状态只能在同一时钟跳变沿从一个状态转向另一个状态;状态的选择不仅取决于各个输入值,还取决于当前状态,可用于产生在时钟跳变沿时刻开关的复杂的控制逻辑,是数字逻辑的控制核心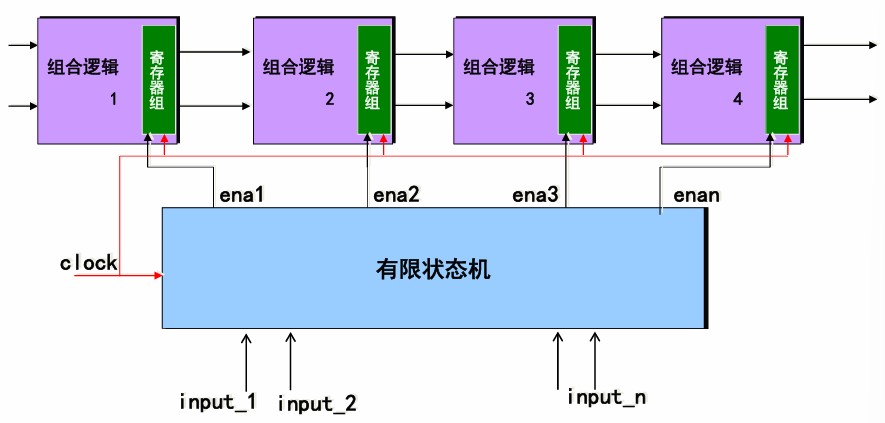
1.有限状态机的优势
- 高效的顺序控制逻辑
克服了纯硬件数字系统顺序方式控制不灵活的缺点,在其运行方式上类似于控制灵活和方便的CPU,是高速高效控制的首选 - 容易利用现成的EDA工具进行优化设计
状态机构建简单,设计方案相对固定,使用HDL综合其可以发挥其强大的优化功能;
性能良好的综合器都具有许多可控或自动优化状态机的功能 - 稳定性能
状态机容易构成良好的同步时序逻辑模块,可用于解决大规模逻辑电路设计中的竞争和冒险现象 - 高速性能
在高速通信和高速控制方面,状态机更有其巨大的优势,一个状态机的功能类似于CPU的功能 - 高可靠性能
状态机是由纯硬件电路构成,不存在CPU运行软件过程中许多固有的缺陷;
状态机的设计中能够使用各种容错技术;
当状态机进入非法状态并从中跳出进入正常状态的时间短暂,对系统的危害不大。
2.有限状态机的分类
一般来说,状态机的基本操作主要有:
状态机的内部状态转换
和
产生输出信号序列
根据电路的输出信号是否与电路的输入有关,可以将状态机划分为:
Moore型状态机
(输出只与当前电路状态有关,保持输出的稳定性和可预测性);
Mealy型状态机
(输出与当前电路状态和当前电路输入有关,来快速响应输入变化)
3.有限状态机的描述方法
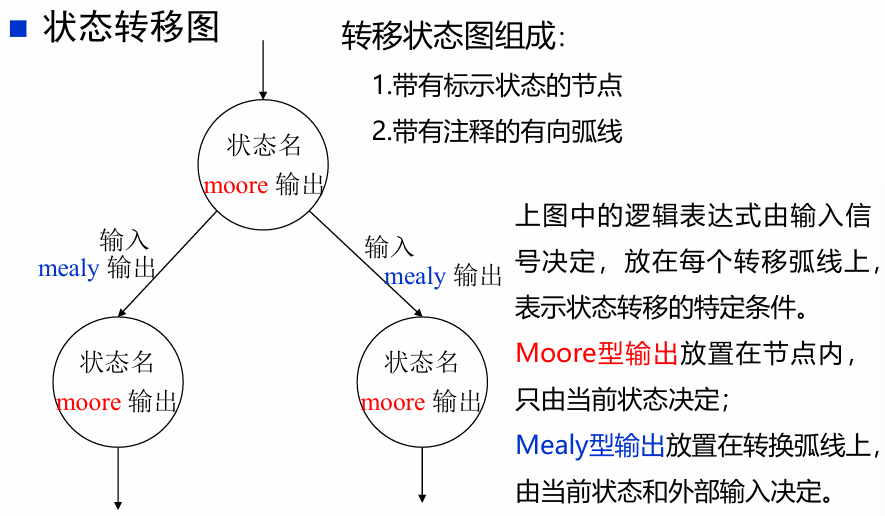
- 状态转移图
:紧凑,适合描述较为简单的系统
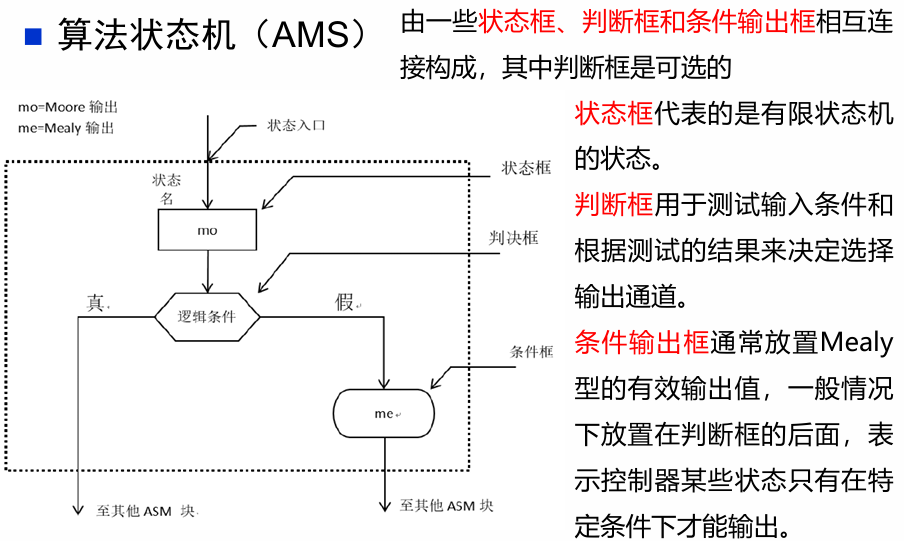
- 算法状态机(ASM)图
算法状态机图更像是流程图,能较好地描述复杂系统中状态的转换和动作
这两种表示方法包含了相同的信息,都包含了状态机的输入、输出、状态和转换。
二、有限状态机的设计
1.状态机的设计步骤
- 依据具体的设计原则,确定采用Moore型状态机还是Mealy型状态机
- 分析设计要求,列出状态机的所有状态,并对每一个状态进行状态编码
- 依据状态转移关系和输出函数,画出状态图
- 依据所画的状态图,采用硬件描述语言对状态机进行描述
2.状态图的完备性和互斥性检查
- 完备性:
对于每一个状态,将所有脱离这一状态的条件表达式进行
逻辑或运算
,如果结果为
1
就是完备的,否则不完备,也就是说状态图进入某状态后,却不能跳出该状态; - 互斥性:
对于每一个状态,将所有脱离这一状态的条件表达式找出,然后任意两个表达式进行
逻辑与
运算,如果结果为
0
就是互斥的。也就是要保证在任何时候不会激活两个脱离状态的转换,即从一个状态跳到两个状态
3.安全状态机设计
- 状态引导法
:对于未使用的状态,也给予次态赋值,避免状态机处于未知状态; - 状态编码检测法
:判断被触发的触发器的个数,当数量大于1时,说明出现问题; - 借助
EDA工具
自动生成安全状态机
三、有限状态机的Verilog HDL描述
考虑如下图所示的状态转移图
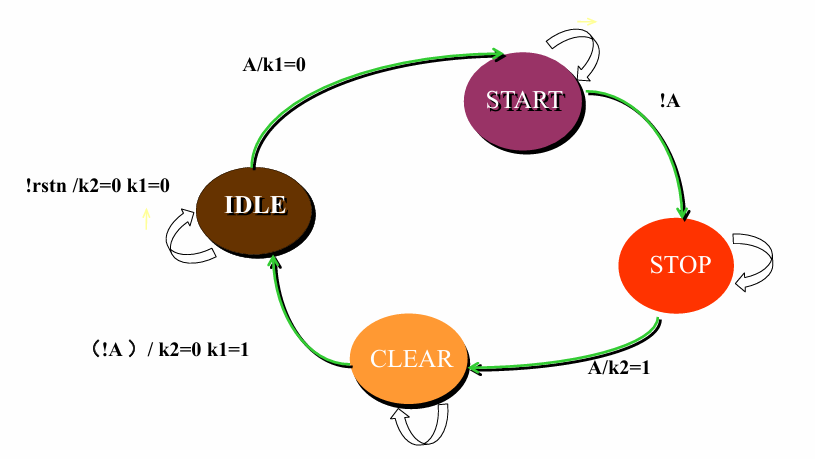
1.描述状态机中各个状态的名称,并指定状态编码
- 状态定义/声明与编码
- 状态必须是常量
parameter
或者
`define
- 状态必须是常量
IDLE=2'b00;
START=2'b01;
STOP=2'b10;
CLEAR=2'B11;
状态寄存器
(位宽必须与parameter变量一致)
- cur_state:存储现态
- next_state:存储次态
- reg [1:0] state:定义状态寄存器
状态编码

module fsm
#(parameter IDLE=2'b00,
parameter START=2'b01,
parameter STOP=2'b10,
parameter CLEAR=2'b11)
( input clk, rstn, a,
output reg k1, k2);
reg [1:0] cur_state, next_state;//定义状态寄存器
2.状态机设计
2.1 设计步骤
- 用时序的
always块
描述状态触发器实现的状态存储; - 使用敏感表和case语句(或if-else等价语句)描述的状态转换逻辑
- 描述状态机的输出逻辑
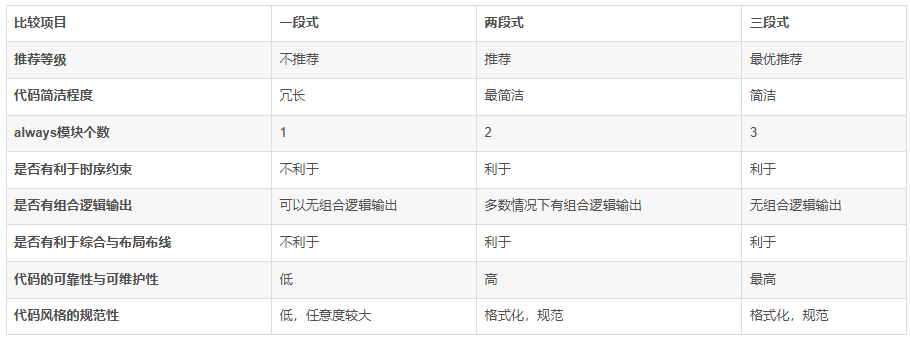
2.2 状态机的三种RTL描述方法
- 一段式
:现态、次态与输出逻辑在同一个always块中 - 两段式
:现态在一个always块中,次态与输出逻辑在一个always块中 - 三段式
:现态、次态与输出逻辑分别在一个always块中
//一段式
always @(posedge clk) begin
if(!rstn) begin
cur_state<=IDLE;
k2<=1'b0;
k1<=1'b0;
end
else
case(cur_state)
IDLE:
if(a) begin
cur_state<=START;
k1<=1'b0;
end
else
cur_state<=IDLE;
START:
if(!a)
cur_state <= STOP;
else
cur_state <=START;
STOP:
if(a) begin
cur_state <= CLEAR;
k2<=1'b1;
end
else
cur_state <= STOP;
CLEAR:
if(!a) begin
cur_state <= IDLE;
k2<=1'b0;
k1<=1'b1;
end
else
cur_state <= CLEAR;
endcase
end
//两段式
always @(posedge clk) begin
if(!rstn)
cur_state <= IDLE;
else
cur_state <= next_state;
end
always @(cur_state, a) begin
case(cur_state)
IDLE:
if(a) begin
next_state=START;
k1=1'b0;
end
else
next_state=IDLE;
START:
if(!a)
next_state = STOP;
else
next_state =START;
STOP:
if(a) begin
next_state = CLEAR;
k2=1'b1;
end
else
next_state = STOP;
CLEAR:
if(!a) begin
next_state = IDLE;
k2=1'b0;
k1=1'b1;
end
else
next_state = CLEAR;
endcase
end
//三段式
always@(posedge clk) begin
if(!rstn)
cur_state <= IDLE;
else
cur_state <= next_state;
end
always@(cur_state, a) begin
case(cur_state)
IDLE:
if(a) next_state = START;
else next_state = IDLE;
START:
if(!a) next_state = STOP;
else next_state = START;
STOP:
if(a) next_state = CLEAR;
else next_state = STOP;
CLEAR:
if(!a) next_state = IDLE;
else next_state = CLEAR;
endcase
end
always@(cur_state, a) begin
k2=1'b0;
k1=1'b0;
if(!rstn) begin
k2=1'b0;
k1=1'b0;
end
else begin
if(cur_state == CLEAR && !a)
k1=1'b1;
else
k1=1'b0;
if(cur_state == STOP && a)
k2=1'b1;
else
k2=1'b0;
end
end
四、有限状态机设计实例
实例1:Moore型序列检测器:
要求描述:
序列检测器可用于检测一组或多组由二进制码组成的脉冲序列信号,当序列检测器连续收到一组串行二进制码后,如果这组码与检测器中预先设置的码相同,则输出1,否则输出0
设计一个“1101”的序列检测器,设din为数字码流输入,sout为检出标记输出,高电平表示发现指定序列,低电平表示没有发现指令序列。
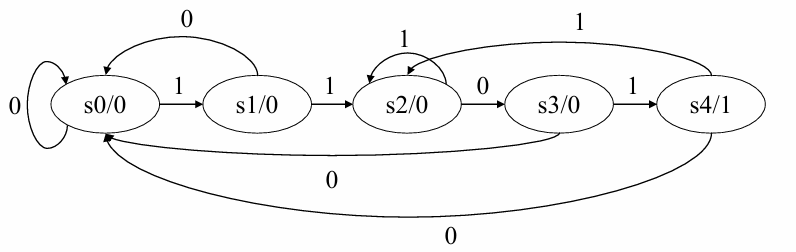
Step1.状态定义
- s0
:未检测到“1” - s1
:检测到输入序列“1” - s2
:检测到输入序列“11” - s3
:检测到输入序列“110” - s4
:检测到输入序列“1101”
共五个状态,需要声明位宽为3的状态寄存器
reg [2:0] cur_state, next_state;
Step2.状态转移表和状态转移图
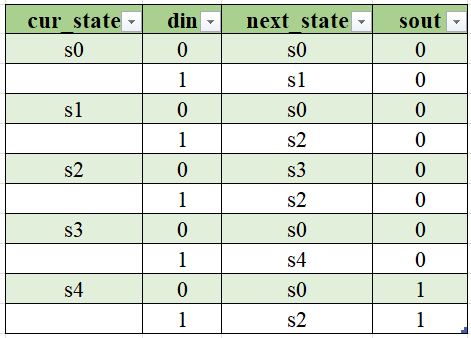
无可简化状态,对应的Moore型状态转移图如下:
Step3.HDL语言描述状态转换
//实现代码
module seqdet#(
parameter s0=3'b000,
parameter s1=3'b001,
parameter s2=3'b010,
parameter s3=3'b011,
parameter s4=3'b100)(
input clk, rstn, din,
output reg sout);
reg [2:0] cur_state, next_state;
always @(posedge clk) begin
if(!rstn) cur_state <= s0;
else cur_state <= next_state;
end
always @(cur_state, din) begin
sout=0;
case(cur_state)
s0: begin
if(din == 1) next_state=s1;
else next_state=s0;
end
s1: begin
if(din == 1) next_state=s2;
else next_state=s0;
end
s2: begin
if(din == 0) next_state=s3;
else next_state=s2;
end
s3: begin
if(din == 1) next_state=s4;
else next_state=s0;
end
s4: begin
if(din == 0) begin next_state=s0; sout=1; end
else begin next_state=s1; sout=1; end
end
default next_state=s0;
endcase
end
endmodule
//仿真代码
module seqdet_tb();
reg clk, rstn, din;
wire sout;
seqdet U1(clk, rstn, din, sout);
always #1 clk=~clk;
initial begin
clk=0; rstn=0; din=0;
#5 rstn=1;
#2 din=1;
#2 din=1;
#2 din=0;
#2 din=1;
#2 din=1;
#2 din=0;
#2 din=0;
#3 rstn=0;
#5 $finish;
end
endmodule
仿真得到的波形图如下:

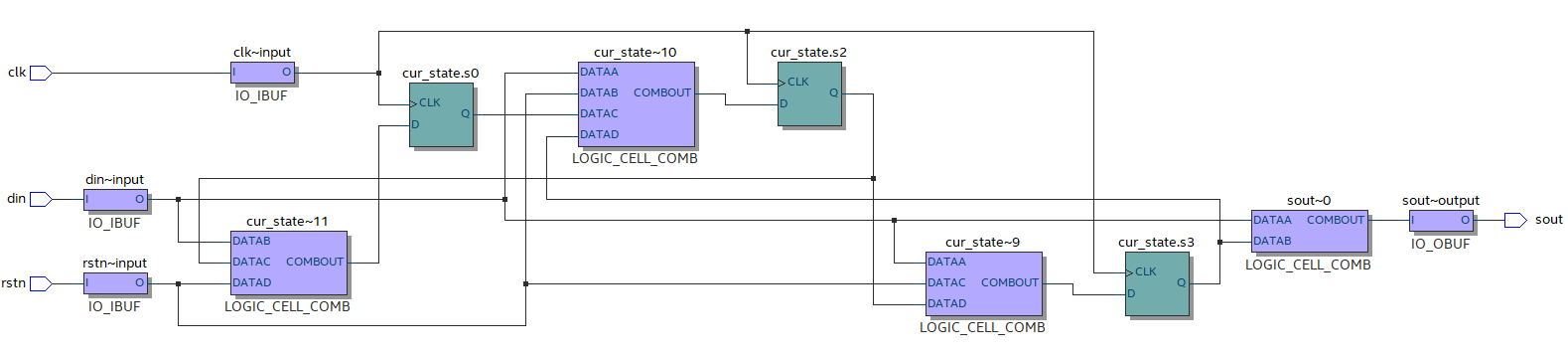
综合出的电路结构图如下:

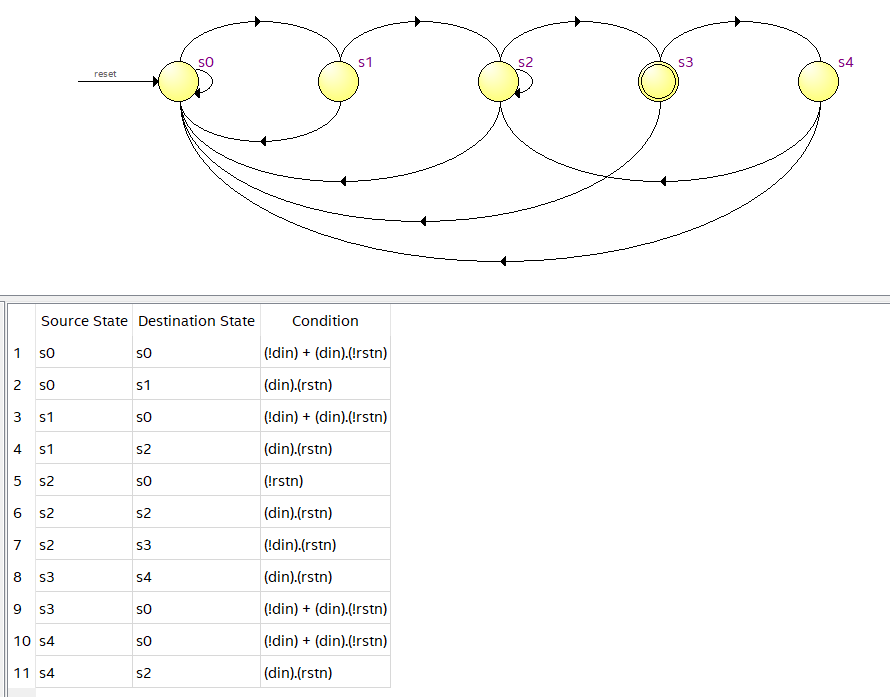
电路状态转移图如下:
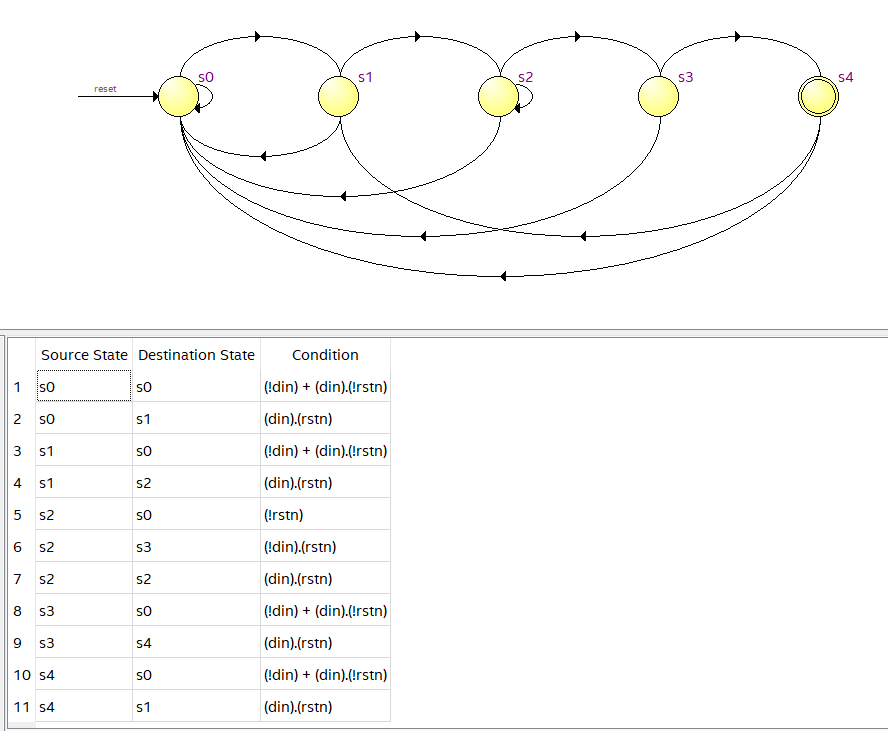
实例2:Mealy型序列检测器:
Step2.状态转移表和状态转换图
状态定义与实例1相同,可以得到状态转移表如下:

对应的Mealy型状态转换图如下:
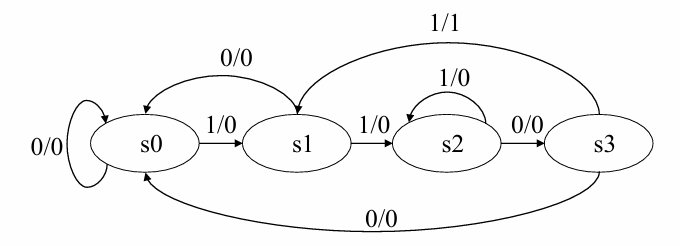
//实现代码
module seqdet_mealy#(
parameter s0=3'b000,
parameter s1=3'b001,
parameter s2=3'b010,
parameter s3=3'b011,
parameter s4=3'b100)(
input clk, rstn, din,
output reg sout);
reg [2:0] cur_state, next_state;
always @(posedge clk) begin
if(!rstn) cur_state <= s0;
else cur_state <= next_state;
end
always @(cur_state, din) begin
sout = 1'b0;
case(cur_state)
s0: if(din==1) next_state=s1;
else next_state=s0;
s1: if(din==1) next_state=s2;
else next_state=s0;
s2: if(din==0) next_state=s3;
else next_state=s2;
s3: if(din==1) begin next_state=s4; sout=1; end
else next_state=s0;
s4: if(din==1) next_state=s2;
else next_state=s0;
default: next_state=s0;
endcase
end
endmodule
//仿真代码
module seqdet_mealy_tb();
reg clk, rstn, din;
wire sout;
seqdet_mealy U1(clk, rstn, din, sout);
always #1 clk=~clk;
initial begin
clk=0; rstn=0; din=0;
#5 rstn=1;
#2 din=1;
#2 din=1;
#2 din=0;
#2 din=1;
#2 din=1;
#2 din=0;
#2 din=0;
#3 rstn=0;
#5 $finish;
end
endmodule
仿真得到的波形图如下:

综合出的电路结构图如下:

电路状态转移图如下: