深度学习之PyTorch实战(5)——对CrossEntropyLoss损失函数的理解与学习
其实这个笔记起源于一个报错,报错内容也很简单,希望传入一个三维的tensor,但是得到了一个四维。
RuntimeError: only batches of spatial targets supported (3D tensors) but got targets of dimension: 4
查看代码报错点,是出现在pytorch计算交叉熵损失的代码。其实在自己手写写语义分割的代码之前,我一直以为自己是对交叉熵损失完全了解的。但是实际上还是有一些些认识不足,所以这里打算复习一下,将其重新梳理一下,才算是透彻的理解了,特地记录下来。
1,交叉熵损失的定义理解
交叉熵是信息论中的一个概念,要想完全理解交叉熵的本质,需要从基础的概念学习。
1.1 信息量
信息量与事件发生的概率有关,某件事情越不可能发生,我们获取的信息量就越大,越可能发生,我们获取的信息量就越小。
假设X是一个离散型随机变量,其取值集合为x,概率分布函数 p(x)=Pr(X=x),则定义事件 X=x0的信息量为:
![]()
由于是概率,所以P(x0)的取值范围是[0, 1],绘图如下:
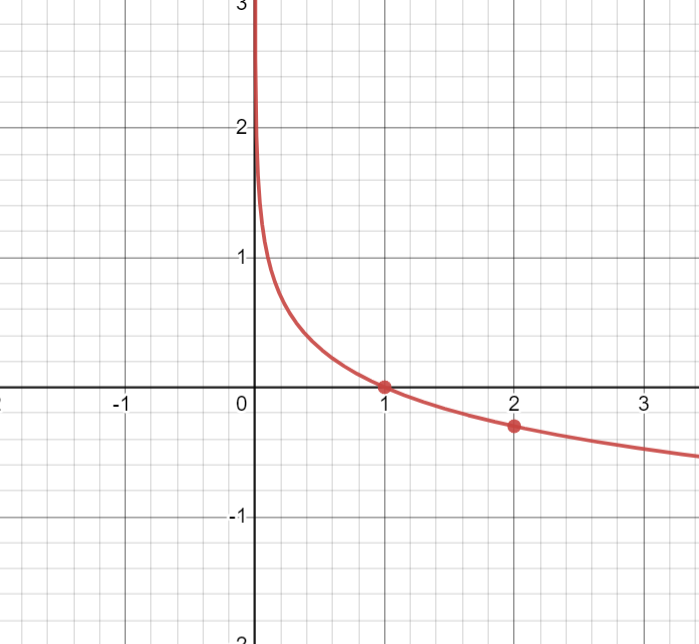
从图像可知,函数符合我们对信息量的直觉,概率越大,信息量越小。
1.2 熵
对于某个事件来说,有多种可能性,每一种可能性都有一个概率 p(Xi),这样就可能计算出某一种可能性的信息量。因为我们上面定义了信息量的定义,而熵就是表达所有信息量的期望,即:
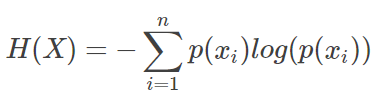
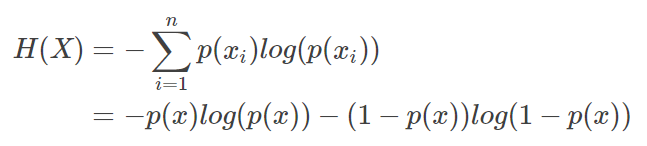
而有一类比较特殊的分布问题,就是0-1分布,对于这类问题你,熵的计算方式可以简化为图下算式:
1.3 相对熵(KL散度)
如果我们对同一个随机变量X有两个单独的概率分布 P(x) 和 Q(x)(在机器学习中,P往往是用来表示样本的真实分布,而Q是表示模型预测的分布。),我们可以使用KL散度来衡量这两个分布的差异。计算公式如下:
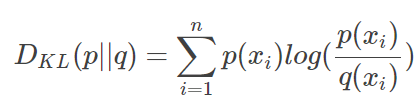
n 为事件的所有可能性,Dkl的值越小,表示P和Q的分布越接近。
1.4 交叉熵
对上式变形可以得到:
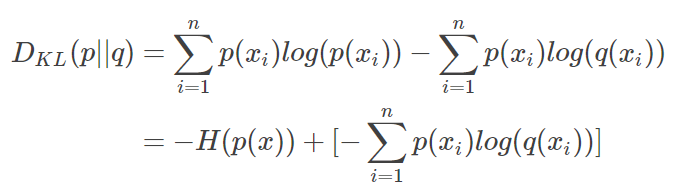
等式的前一部分是p的熵,后一部分是交叉熵:
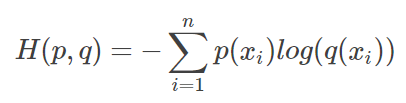
在机器学习中,我们需要评估label和predict之间的差距,使用KL散度刚刚好。由于KL散度的前一部分 -H(y)不变,故在优化过程中,只需要关注交叉熵就可以了,所以一般在机器学习中直接用交叉熵做loss,评估模型。因为交叉熵刻画的是两个概率分布的距离,也就是说交叉熵值越小(相对熵的值越小),两个概率分布越接近。
1.5 交叉熵在单标签分类问题的使用
这里的单标签分类,就是深度学习最基本的分类问题,每个图像只有一个标签,只能是label1或者label2。
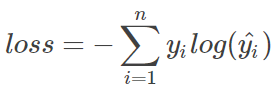
上图是一个样本loss的计算方式,n代表n种label,yi表示真实结果, yihat表示预测概率。如果是一个batch,则需要除以m(m为当前batch的样本数)。
1.6 交叉熵在多标签分类问题的使用
这里的多标签分类是指,每一张图像样本可以有多个类别,多分类标签是n-hot,值得注意的是,这里的pred不再用softmax计算了,采用的是Sigmoid了。将每一个节点的输出归一化到0-1之间。所以pred的值的和也不再是1。比如我们的语义分割,每个像素的label都是独立分布的,相互之间没有任何影响,所以交叉熵在这里是单独对每一个节点进行计算,每一个节点只有两种可能性,所以是一个二项分布。(上面有简化后交叉熵的公式)
每个样本的loss即为 loss = loss1 + loss2 + ... lossn。
每一个batch的loss就是:
![]()
其中m为当前batch的样本量,n为类别数。
2,Pytorch中CrossEntropy的形式
语义分割的本质是对像素的分类。因此语义分割也是使用这个损失函数。首先看代码定义:
def cross_entropy(input, target, weight=None, size_average=None, ignore_index=-100,
reduce=None, reduction='mean'):
# type: (Tensor, Tensor, Optional[Tensor], Optional[bool], int, Optional[bool], str) -> Tensor
if size_average is not None or reduce is not None:
reduction = _Reduction.legacy_get_string(size_average, reduce)
return nll_loss(log_softmax(input, 1), target, weight, None, ignore_index, None, reduction)
从上面代码可知:input和target是Tensor格式,并且先计算log_softmax,再计算nll_loss。(实际上softmax计算+ log计算 + nll_loss 计算== 直接使用CrossEntropyLoss计算)
2.1 通过softmax+log+nll_loss 计算CrossEntropyLoss
我们直接在语义分割中应用:
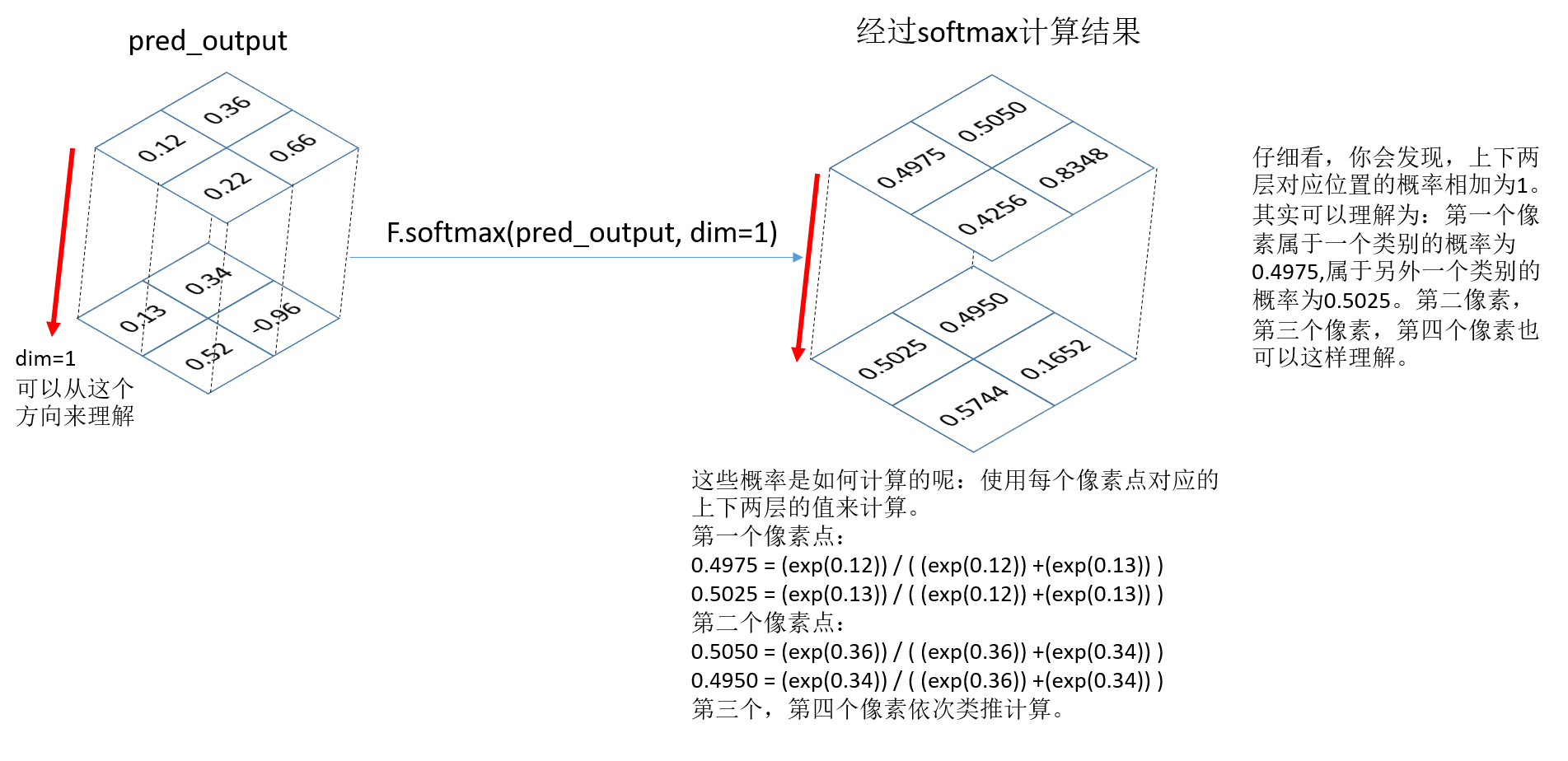
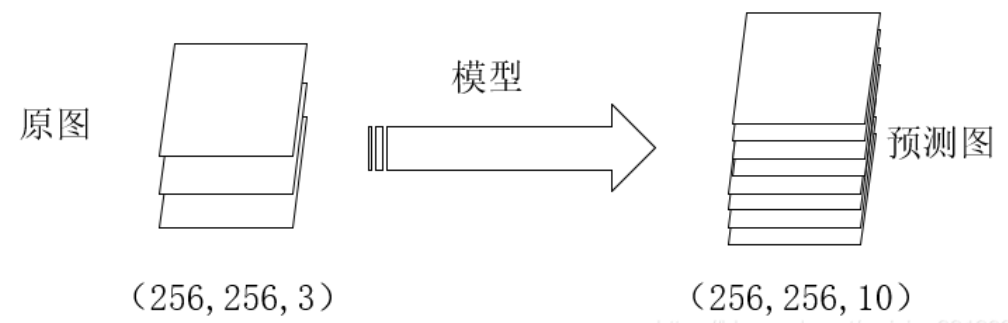
下面softmax函数肯定输出的是网络的输出预测图像,假设维度为(1,2,2,2),从左到右dim依次为0,1,2,3,也就是说类别数所在的维度表示dim=1应在的维度上计算概率。所以dim=1
temp1 = F.softmax(pred_output,dim=1)
print("temp1:",temp1)
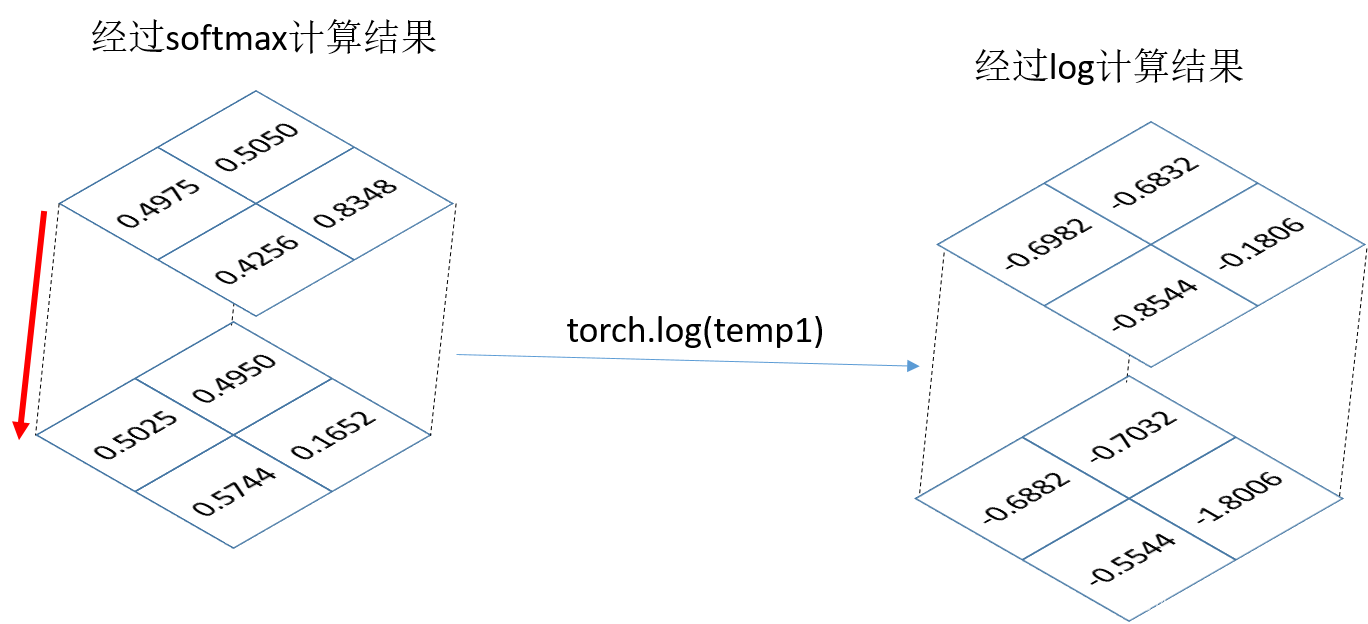
log函数:就是对输入矩阵的每个元素求对数,默认底数为e,也就是In函数
temp3 = torch.log(temp1)
print("temp3:",temp3)
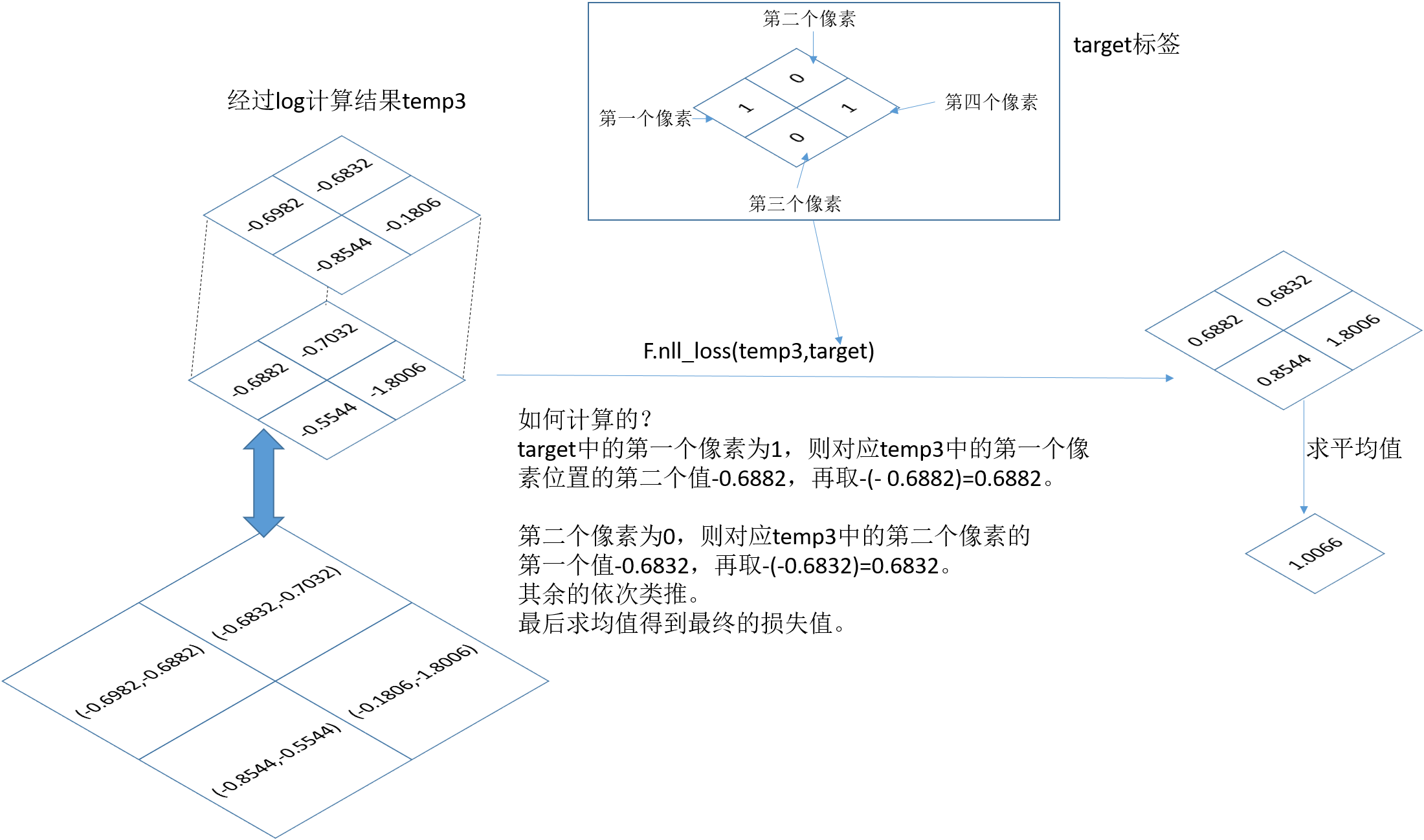
nll_loss函数:这个函数的目的是把标签图像的元素值,作为索引值,在上面选择相应的值求平均。
target = target.long()
loss1 = F.nll_loss(temp3,target)
print('loss1: ', loss1)
2.2 直接使用交叉熵损失计算
直接使用交叉熵损失计算:
loss2 = nn.CrossEntropyLoss()
result2 = loss2(pred_output, target)
print('result2: ', result2)
对比结果可以发现 通过 对CrossEntropyLoss函数分解并分步计算的结果,与直接使用CrossEntropyLoss函数计算的结果一致。
2.3 pytorch 和 tensorflow在损失函数计算方面的差异
pytorch和tensorflow在损失函数计算方面有细微的差别的,为啥对比pytorch和tensorflow的差异,因为一个更符合人的想法,一个稍微有一些阉割的问题,导致我们按照常理写代码,会遇到问题。
tensorflow的模型训练:
one-hot编码:
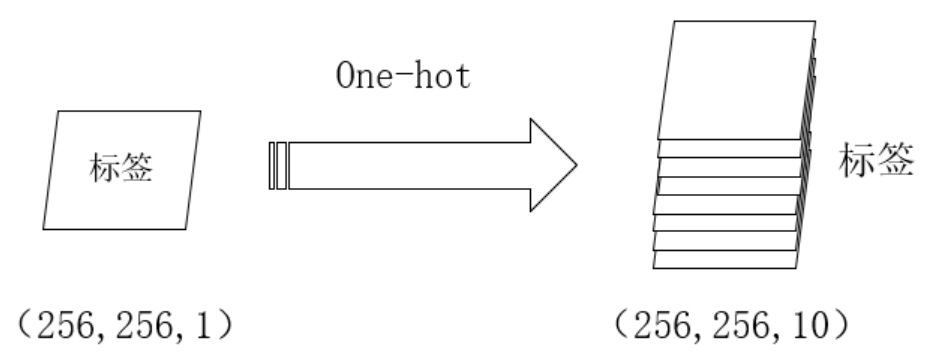
通过这两步骤,我们就可以计算标签和模型产生的预测结果之间的损失了。而
在pytorch中,我们不需要对标签进行one-hot编码,且需要将通道这一维度压缩。即标签中的值为对应的类别数
。
具体在代码中,如果是一个类别,就特别要注意(因为我就是没注意,所以就有开头的错):
masks_pred = model(images)
if model.n_classes == 1:
loss = criterion(masks_pred.squeeze(1), true_masks.float())
loss += dice_loss(F.sigmoid(masks_pred.squeeze(1)), true_masks.float(), multiclass=False)
else:
loss = criterion(masks_pred, true_masks)
loss += dice_loss(
F.softmax(masks_pred, dim=1).float(),
F.one_hot(true_masks, model.n_classes).permute(0, 3, 1, 2).float(),
multiclass=True
)
3,Pytorch中,nn与nn.functional的相同点和不同点
3.1 相同点
首先两者的功能相同,nn.xx与nn.functional.xx的实际功能是相同的,只是一个是包装好的类,一个是可以直接调用的函数。
比如我们这里学习的Crossentropy函数:
在torch.nn中定义如下:
class CrossEntropyLoss(_WeightedLoss):
__constants__ = ['ignore_index', 'reduction', 'label_smoothing']
ignore_index: int
label_smoothing: float
def __init__(self, weight: Optional[Tensor] = None, size_average=None, ignore_index: int = -100,
reduce=None, reduction: str = 'mean', label_smoothing: float = 0.0) -> None:
super(CrossEntropyLoss, self).__init__(weight, size_average, reduce, reduction)
self.ignore_index = ignore_index
self.label_smoothing = label_smoothing
def forward(self, input: Tensor, target: Tensor) -> Tensor:
return F.cross_entropy(input, target, weight=self.weight,
ignore_index=self.ignore_index, reduction=self.reduction,
label_smoothing=self.label_smoothing)
在torch.nn.functional中定义如下:
def cross_entropy(
input: Tensor,
target: Tensor,
weight: Optional[Tensor] = None,
size_average: Optional[bool] = None,
ignore_index: int = -100,
reduce: Optional[bool] = None,
reduction: str = "mean",
label_smoothing: float = 0.0,
) -> Tensor:
if has_torch_function_variadic(input, target, weight):
return handle_torch_function(
cross_entropy,
(input, target, weight),
input,
target,
weight=weight,
size_average=size_average,
ignore_index=ignore_index,
reduce=reduce,
reduction=reduction,
label_smoothing=label_smoothing,
)
if size_average is not None or reduce is not None:
reduction = _Reduction.legacy_get_string(size_average, reduce)
return torch._C._nn.cross_entropy_loss(input, target, weight, _Reduction.get_enum(reduction), ignore_index, label_smoothing)
可以看到torch.nn下面的CrossEntropyLoss类在forward时调用了nn.functional下的cross_entropy函数,当然最终的计算是通过C++编写的函数计算的。
3.2 不同点
不同点1
:在使用nn.CrossEntropyLoss()之前,需要先实例化,再输入参数,以函数调用的方式调用实例化的对象并传入输入数据:
import torch.nn as nn loss = torch.nn.CrossEntropyLoss() output = loss(x, y)
使用 F.cross_entropy()直接可以传入参数和输入数据,而且由于F.cross_entropy() 得到的是一个向量也就是对batch中每一个图像都会得到对应的交叉熵,所以计算出之后,会使用一个mean()函数,计算其总的交叉熵,再对其进行优化。
import torch.nn.functional as F loss = F.cross_entropy(input, target).mean()
不同点2
:而且 nn.xxx 继承于nn.Module,能够很好的与nn.Sequential结合使用,而nn.functional.xxx 无法与nn.Sequential结合使用。举个例子:
layer = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=3, padding=1),
nn.BatchNorm2d(num_features=64),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2),
nn.Dropout(0.2)
)
不同点3:nn.xxx 不需要自己定义和管理weight;而nn.functional.xxx需要自己定义weight,每次调用的时候都需要手动传入weight,不利于代码复用。其实如果我们只保留了nn.functional下的函数的话,在训练或者使用时,我们就需要手动去维护weight, bias, stride 这些中间量的值;而如果只保留nn下的类的话,其实就牺牲了一部分灵活性,因为做一些简单的计算都需要创建一个类,这也与PyTorch的风格不符。
比如使用nn.xxx定义一个网络,如下:
import torch
import torch.nn as nn
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
以一个最简单的五层网络为例。需要维持状态的,主要是两个卷积和三个线性变换,所以在构造Module是,定义了两个Conv2d和三个nn.Linear对象,而在计算时,relu之类不需要保存状态的可以直接使用。
参考地址(这个只是个人笔记,不做商业):
https://blog.csdn.net/tsyccnh/article/details/79163834
https://www.zhihu.com/question/66782101
https://blog.csdn.net/weixin_39190382/article/details/114433884)
https://blog.csdn.net/Fcc_bd_stars/article/details/105158215