机器学习策略篇:详解正交化(Orthogonalization)
正交化
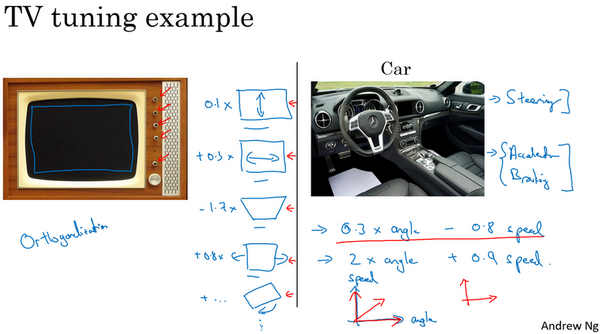
这是一张老式电视图片,有很多旋钮可以用来调整图像的各种性质,所以对于这些旧式电视,可能有一个旋钮用来调图像垂直方向的高度,另外有一个旋钮用来调图像宽度,也许还有一个旋钮用来调梯形角度,还有一个旋钮用来调整图像左右偏移,还有一个旋钮用来调图像旋转角度之类的。电视设计师花了大量时间设计电路,那时通常都是模拟电路来确保每个旋钮都有相对明确的功能。如一个旋钮来调整这个(高度),一个旋钮调整这个(宽度),一个旋钮调整这个(梯形角度),以此类推。
相比之下,想象一下,如果有一个旋钮调的是
\(0.1x\)
表示图像高度,
\(+0.3x\)
表示图像宽度,
\(-1.7x\)
表示梯形角度,
\(+0.8x\)
表示图像在水平轴上的坐标之类的。如果调整这个(其中一个)旋钮,那么图像的高度、宽度、梯形角度、平移位置全部都会同时改变,如果有这样的旋钮,那几乎不可能把电视调好,让图像显示在区域正中。
所以在这种情况下,正交化指的是电视设计师设计这样的旋钮,使得每个旋钮都只调整一个性质,这样调整电视图像就容易得多,就可以把图像调到正中。
接下来是另一个正交化例子,想想学车的时候,一辆车有三个主要控制,第一是方向盘,方向盘决定往左右偏多少,还有油门和刹车。就是这三个控制,其中一个控制方向,另外两个控制的速度,这样就比较容易解读。知道不同控制的不同动作会对车子运动有什么影响。

想象一下,如果有人这么造车,造了个游戏手柄,手柄的一个轴控制的是
\(0.3×\)
转向角-速度,然后还有一个轴控制的是
\(2×\)
转向角
\(+0.9×\)
车速,理论上来说,通过调整这两个旋钮是可以将车子调整到希望得到的角度和速度,但这样比单独控制转向角度,分开独立的速度控制要难得多。
所以正交化的概念是指,可以想出一个维度,这个维度想做的是控制转向角,还有另一个维度来控制的速度,那么就需要一个旋钮尽量只控制转向角,另一个旋钮,在这个开车的例子里其实是油门和刹车控制了的速度。但如果有一个控制旋钮将两者混在一起,比如说这样一个控制装置同时影响的转向角和速度,同时改变了两个性质,那么就很难令的车子以想要的速度和角度前进。然而正交化之后,正交意味着互成90度。设计出正交化的控制装置,最理想的情况是和实际想控制的性质一致,这样调整参数时就容易得多。可以单独调整转向角,还有的油门和刹车,令车子以想要的方式运动。
那么这与机器学习有什么关系呢?要弄好一个监督学习系统,通常需要调的系统的旋钮。
确保四件事情,首先,通常必须确保至少系统在训练集上得到的结果不错,所以训练集上的表现必须通过某种评估,达到能接受的程度,对于某些应用,这可能意味着达到人类水平的表现,但这取决于的应用,将在后面更多地谈谈如何与人类水平的表现进行比较。但是,在训练集上表现不错之后,就希望系统也能在开发集上有好的表现,然后希望系统在测试集上也有好的表现。在最后,希望系统在测试集上系统的成本函数在实际使用中表现令人满意,比如说,希望这些猫图片应用的用户满意。
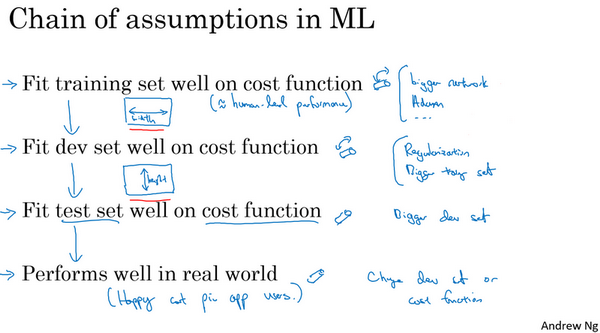
回到电视调节的例子,如果的电视图像太宽或太窄,想要一个旋钮去调整,可不想要仔细调节五个不同的旋钮,它们也会影响别的图像性质,只需要一个旋钮去改变电视图像的宽度。
所以类似地,如果的算法在成本函数上不能很好地拟合训练集,想要一个旋钮,是的画这东西表示旋钮,或者一组特定的旋钮,这样可以用来确保的可以调整的算法,让它很好地拟合训练集,所以用来调试的旋钮是可能可以训练更大的网络,或者可以切换到更好的优化算法,比如
Adam
优化算法,等等。
相比之下,如果发现算法对开发集的拟合很差,那么应该有独立的一组旋钮,是的,这就是画得毛毛躁躁的另一个旋钮,希望有一组独立的旋钮去调试。比如说,的算法在开发集上做的不好,它在训练集上做得很好,但开发集不行,然后有一组正则化的旋钮可以调节,尝试让系统满足第二个条件。类比到电视,就是现在调好了电视的宽度,如果图像的高度不太对,就需要一个不同的旋钮来调节电视图像的高度,然后希望这个旋钮尽量不会影响到电视的宽度。增大训练集可以是另一个可用的旋钮,它可以帮助的学习算法更好地归纳开发集的规律,现在调好了电视图像的高度和宽度。
如果它不符合第三个标准呢?如果系统在开发集上做的很好,但测试集上做得不好呢?如果是这样,那么需要调的旋钮,可能是更大的开发集。因为如果它在开发集上做的不错,但测试集不行这可能意味着对开发集过拟合了,需要往回退一步,使用更大的开发集。
最后,如果它在测试集上做得很好,但无法给的猫图片应用用户提供良好的体验,这意味着需要回去,改变开发集或成本函数。因为如果根据某个成本函数,系统在测试集上做的很好,但它无法反映的算法在现实世界中的表现,这意味着要么的开发集分布设置不正确,要么的成本函数测量的指标不对。
如果现在无法理解全部细节,别担心,但希望对这种正交化过程有个概念。要非常清楚,到底是四个问题中的哪一个,知道可以调节哪些不同的东西尝试解决那个问题。
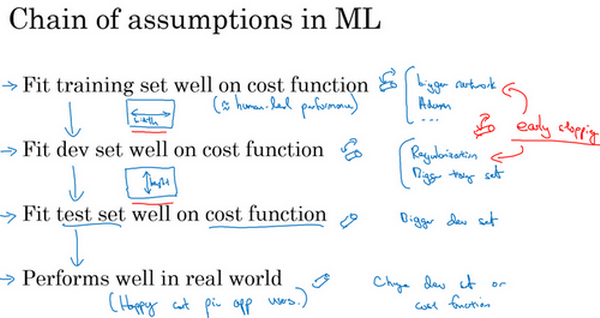
当训练神经网络时,一般不用
early stopping
,这个技巧也还不错,很多人都这么干。但个人而言,觉得用
early stopping
有点难以分析,因为这个旋钮会同时影响对训练集的拟合,因为如果早期停止,那么对训练集的拟合就不太好,但它同时也用来改善开发集的表现,所以这个旋钮没那么正交化。因为它同时影响两件事情,就像一个旋钮同时影响电视图像的宽度和高度。不是说这样就不要用,如果想用也是可以的。但如果有更多的正交化控制,比如这里写出的其他手段,用这些手段调网络会简单不少。
所以希望对正交化的意义有点概念,就像看电视图像一样。如果说,的电视图像太宽,所以要调整这个旋钮(宽度旋钮)。或者它太高了,所以要调整那个旋钮(高度旋钮)。或者它太梯形了,所以要调整这个旋钮(梯形角度旋钮),这就很好。
在机器学习中,如果可以观察的系统,然后说这一部分是错的,它在训练集上做的不好、在开发集上做的不好、它在测试集上做的不好,或者它在测试集上做的不错,但在现实世界中不好,这就很好。必须弄清楚到底是什么地方出问题了,然后刚好有对应的旋钮,或者一组对应的旋钮,刚好可以解决那个问题,那个限制了机器学习系统性能的问题。